reCamera 工作坊

这是本次工作坊的流程图。若遇到任何问题,可向工作人员咨询,并说明出现问题时正在执行哪一步骤、哪一选项的操作,以便我们快速帮您定位问题。
第一步:数据集采集
选项 1:从Roboflow下载数据集
Roboflow 推理服务器支持多种计算机视觉模型的数据集下载(免费)、训练与部署(付费)。用户也可上传自有数据集进行标注和训练(付费)。本次仅下载免费数据集,并在自有服务器上开展训练。
步骤 1:网络设置
注意:下载数据前请断开 reCamera 的连接。
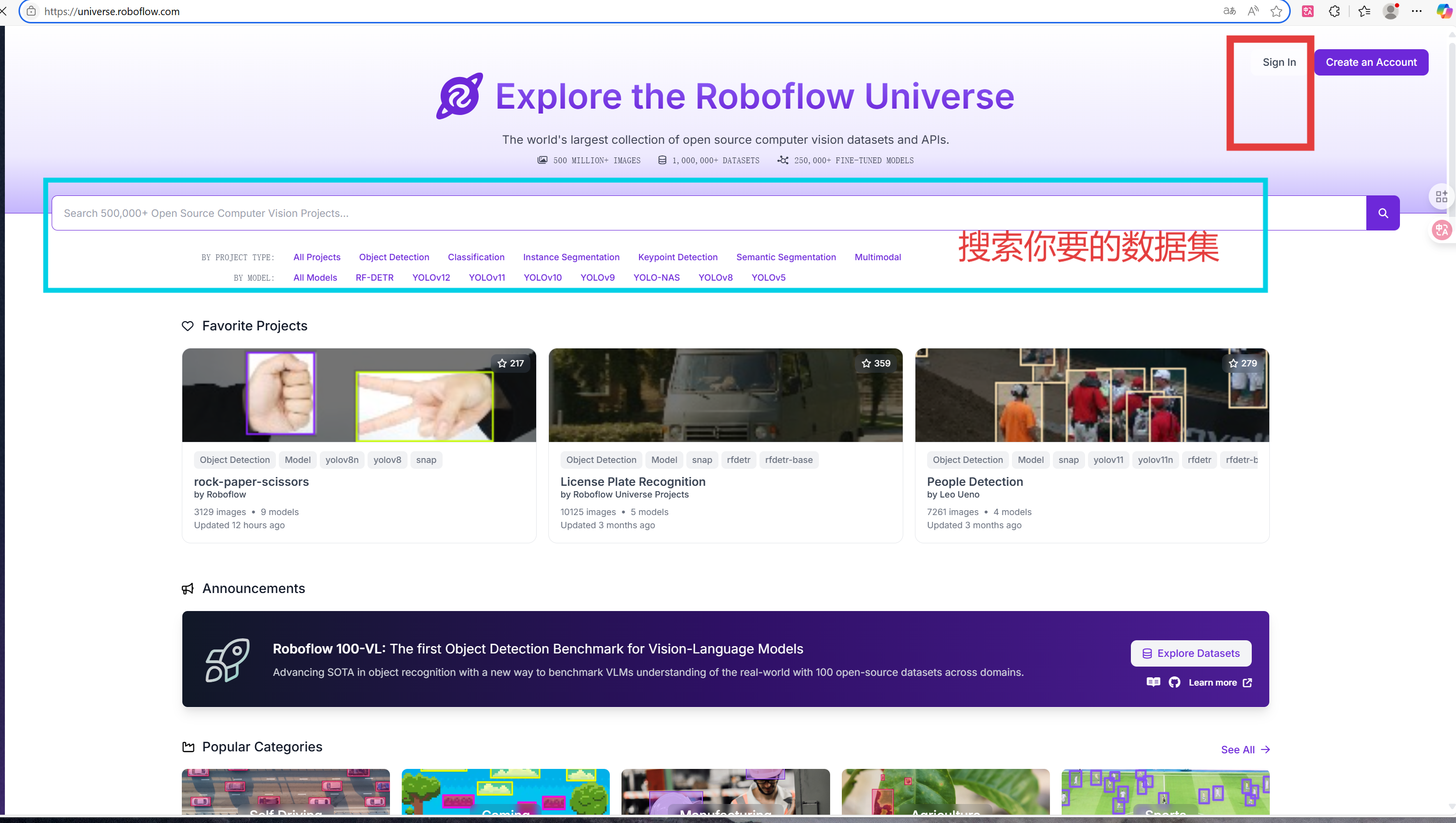
访问链接:https://universe.roboflow.com/
步骤 2:登录
使用 GitHub 账号或邮箱登录。

步骤 3:下载公共数据集
搜索所需数据集名称,建议选择包含 1000-2000 张图像的数据集。
点击数据集并等待页面完全加载。页面中可能出现 “Fork project”(复刻项目)或 “Download project”(下载项目)—— 无需点击这两个选项。在左侧工具栏找到 “Dataset”(数据集),点击 “Download dataset”(下载数据集):

选择第三个选项:

选择 “YOLOv11” 格式并下载压缩包,点击 “继续”:

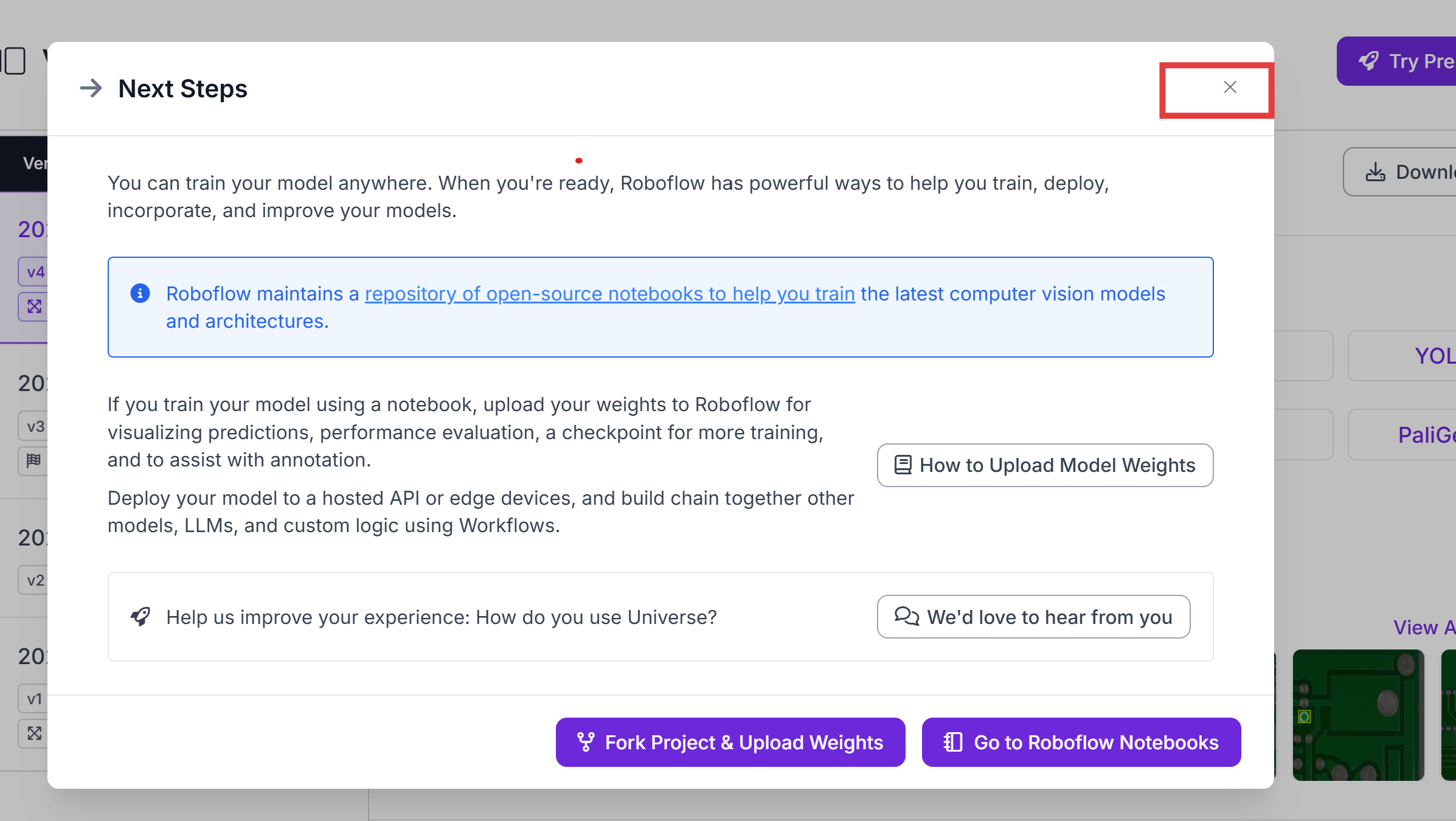
直接关闭最终弹出的窗口,无需理会:
此时浏览器将开始下载数据集压缩包,可在下载列表中查看:

数据集结构
data/ # 数据集根目录
├── test/ # 测试集
│ ├── images/ # 图像文件
│ └── labels/ # 标签文件
│── train/ # 训练集
│ ├── images/ # 图像文件
│ └── labels/ # 标签文件
│
│── valid/ # 验证集
│ ├── images/ # 图像文件
│ └── labels/ # 标签文件
│
│── data.yaml # 配置文件:包含数据集路径、类别及元数据
│
└── README.md # 文档说明
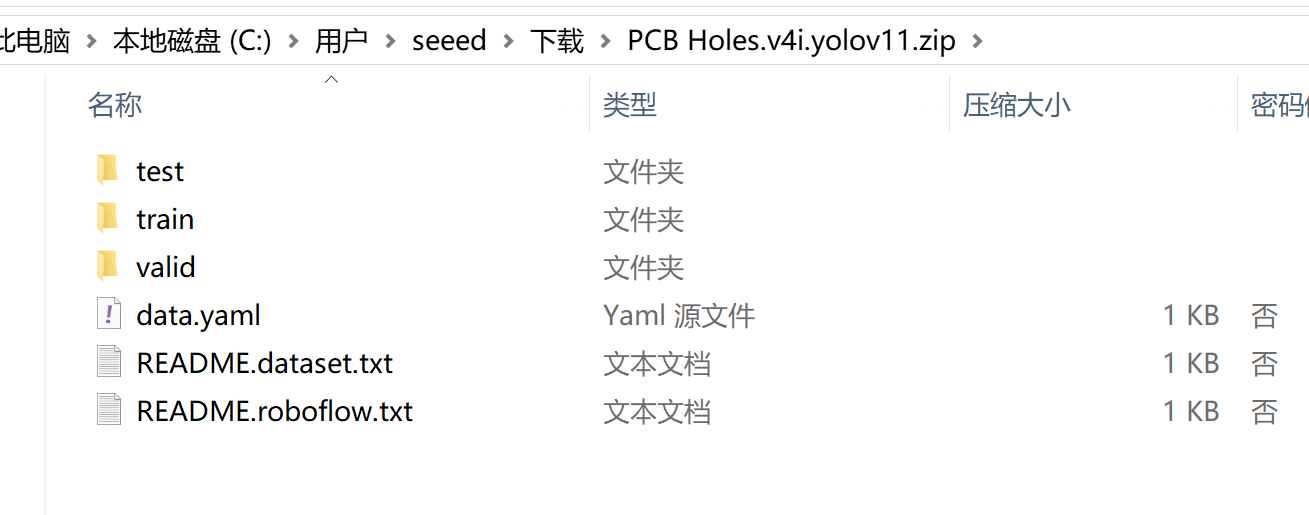
成功下载的 .zip 压缩文件夹,将在 第二步:训练 Yolo11n 模型 中使用,现在可进入训练环节。
选项 2:使用CVAT平台标注数据集
如需手动标注自有图像,可通过 CVAT 平台完成标注,并以多种格式导出数据集。
步骤 1:登录
访问链接:cvat.ai
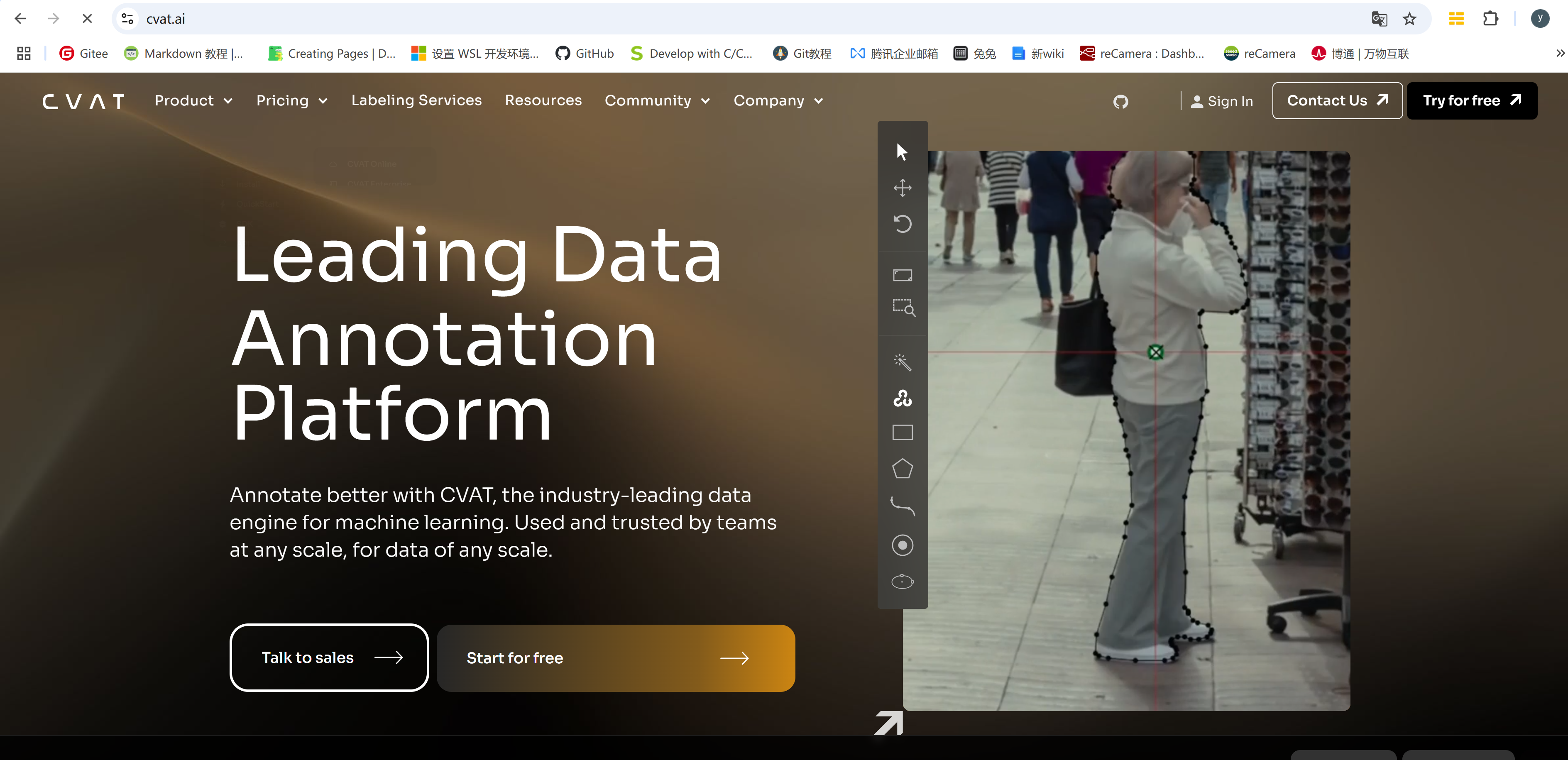
点击 “start for free”(免费开始),选择任一登录方式。
步骤 2:创建项目与标签
- 创建新项目,并添加标签名称(根据实际标注需求设置):
步骤 3:创建标注任务
- 新建任务,设置任务名称、选择所属项目,然后上传待标注图像:

- 进入 “Jobs”(任务)板块,点击图像进入标注界面:
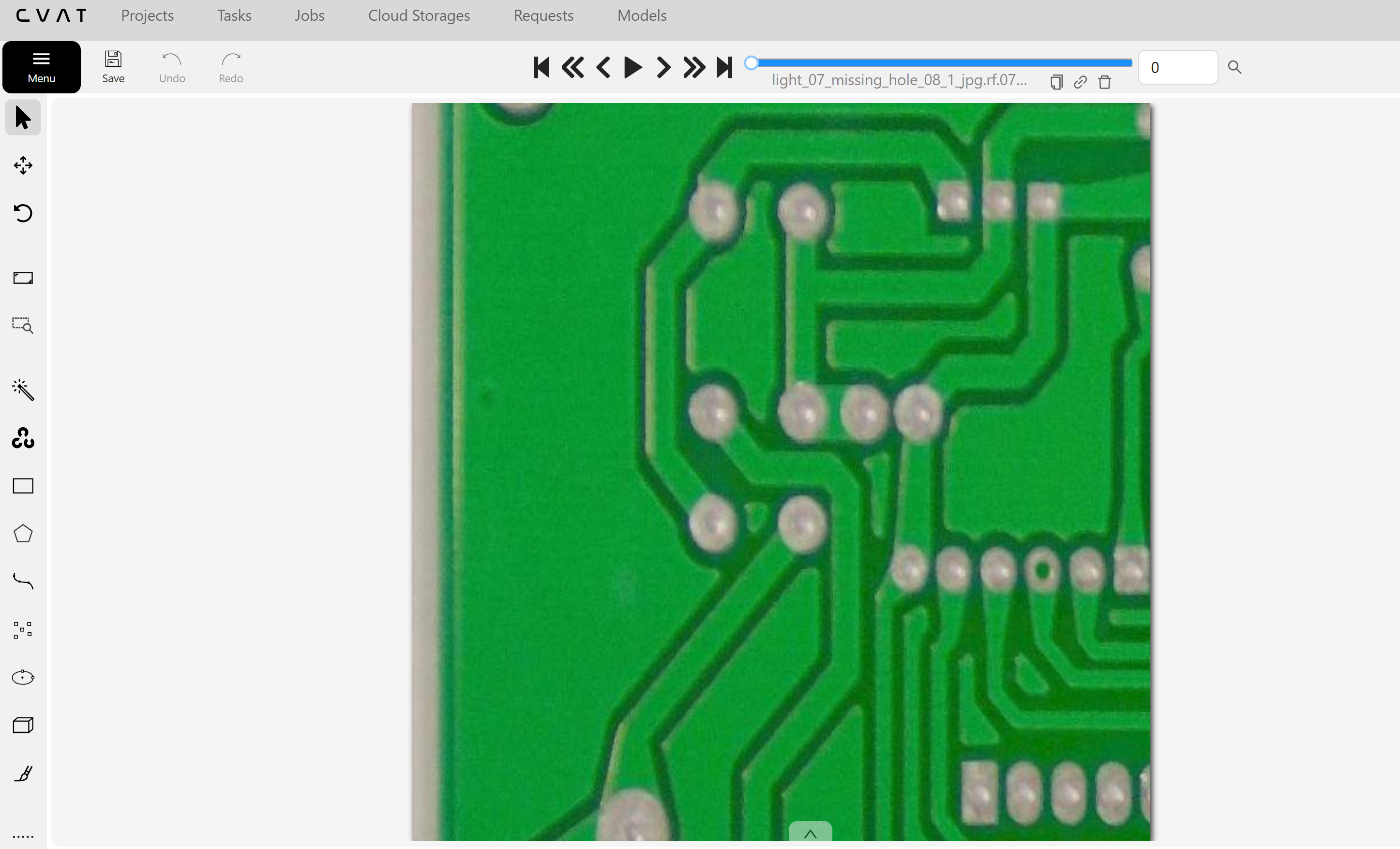
步骤 4:图像标注
- 标注界面介绍:
- 自动分割标注:使用 SAM 模型实现自动分割(适用于分割任务):

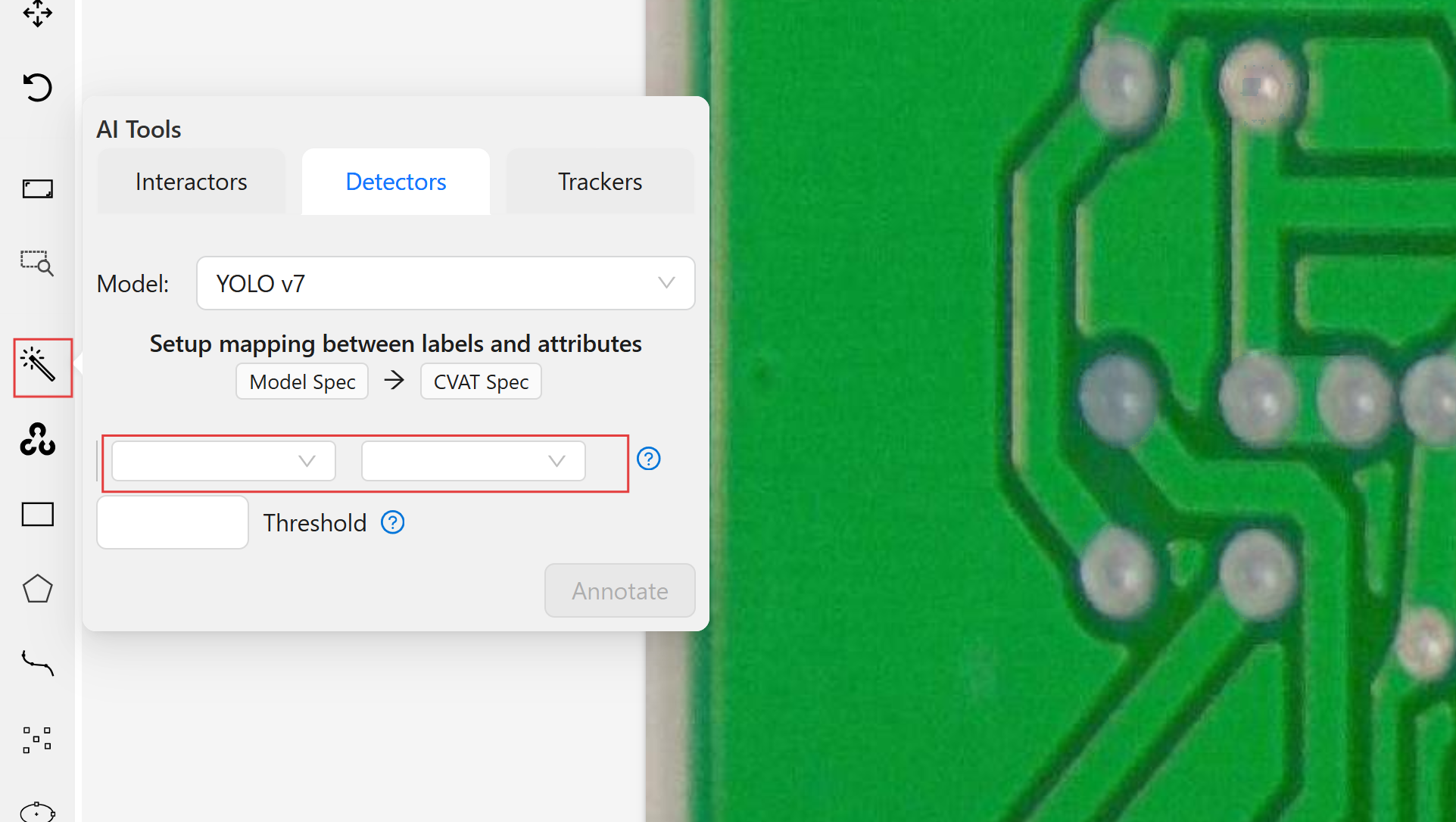
- 自动目标检测:使用自动检测工具(支持与 YOLO 兼容的目标,适用于检测任务):
- 手动标注:对于自定义目标,使用手动边界框工具标注:

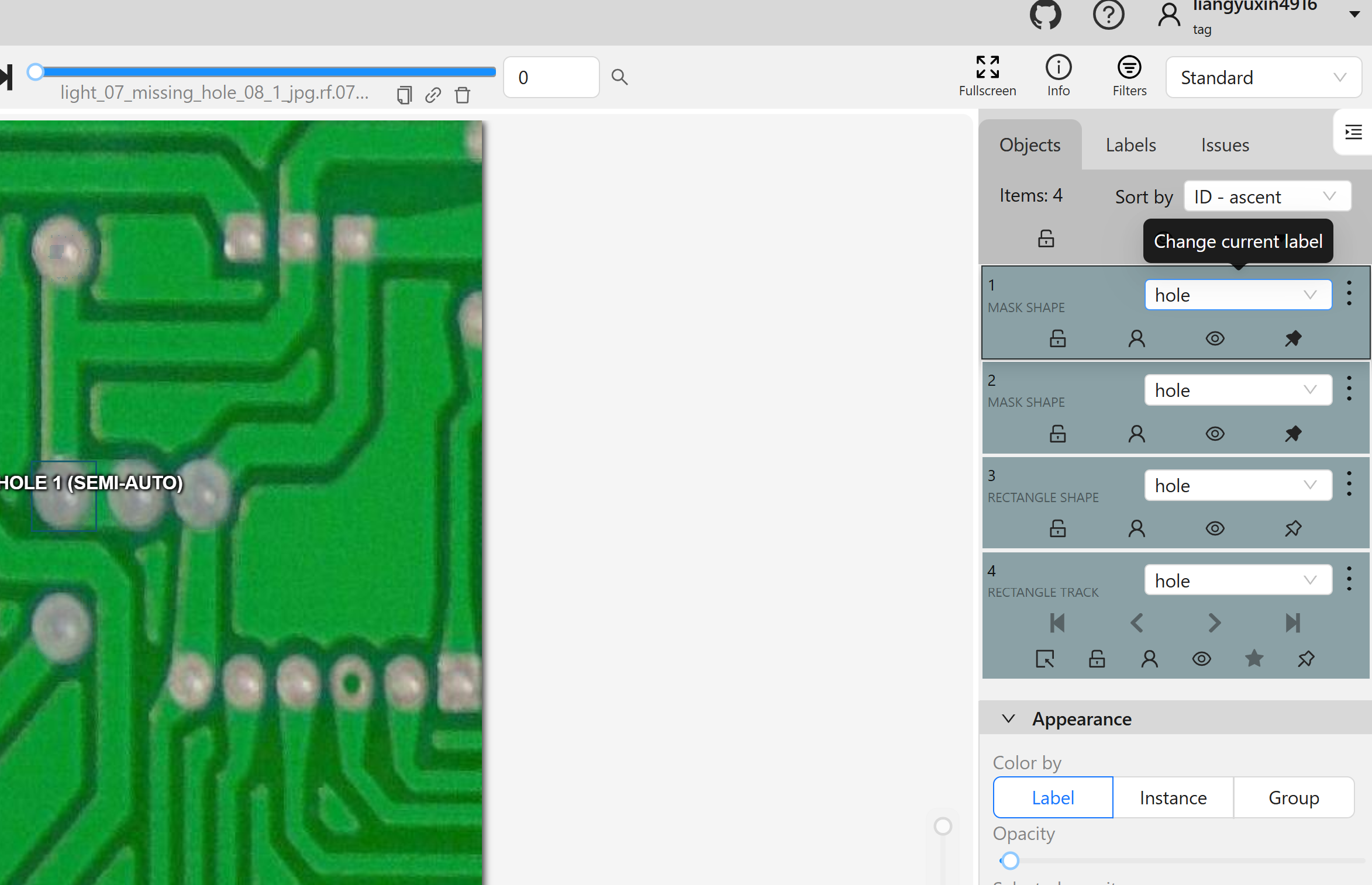
- 编辑标注:在右侧面板修改标注信息(如标签、坐标等):
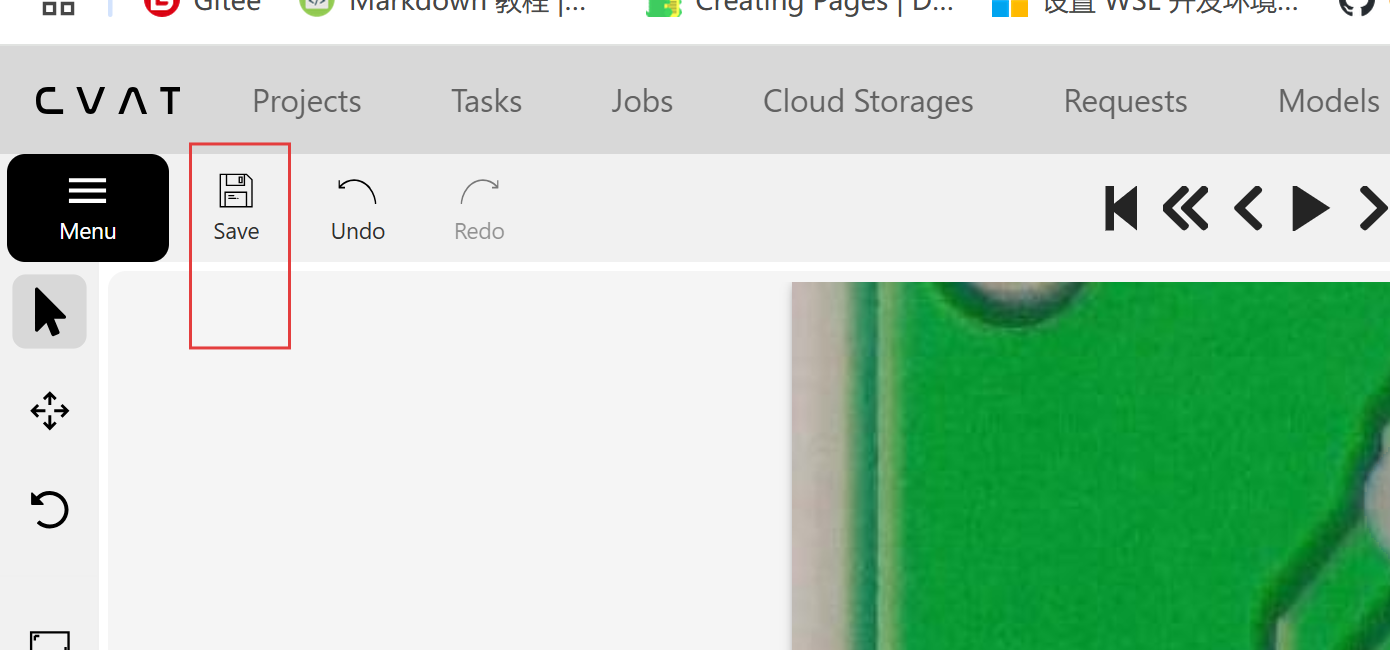
- 保存标注:点击左上角按钮保存标注结果:
步骤 5:完成任务与导出数据集
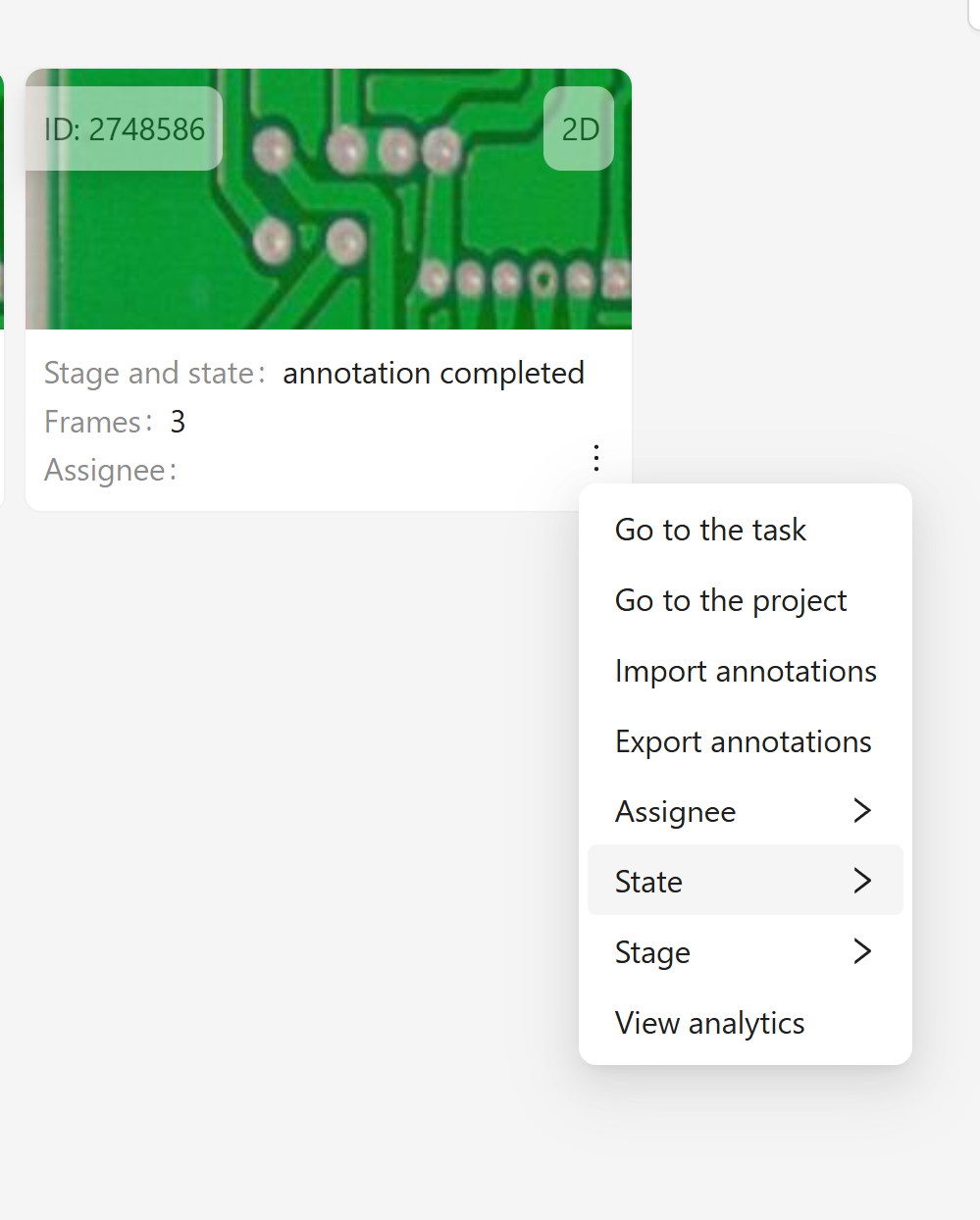
- 将任务标记为 “完成”:
- 导出数据集:点击导出按钮,选择 “Ultralytics YOLO Detection Track 1.0” 格式(适配 Yolo 模型):

- 下载数据集压缩包:

步骤 6:整理数据集
下载的文件不含图像,需手动按以下结构整理:
参照 “选项 1” 的数据集结构,整理为如下格式:

配置 data.yaml 文件
示例如下(需根据实际数据集路径和标签修改):
train: ../train/images # 训练集图像路径,需根据实际路径调整
val: ../valid/images # 验证集图像路径
test: ../test/images # 测试集图像路径
nc: 1 # 标签类别数量
names: ['missing hole'] # 标签名称,替换为实际标注标签
roboflow:
workspace: rf-projects
project: pcb-holes
version: 4
license: CC BY 4.0
url: https://universe.roboflow.com/rf-projects/pcb-holes/dataset/4
最后,将整理好的数据集压缩为 .zip 文件夹,将在 第二步:训练 Yolo11n 模型中使用。

选项 3:使用 SpireView 软件标注数据集(仅适用于 Windows)
如需手动标注自有图像,可使用 SpireView 软件完成标注,并以多种格式导出数据集。该软件需本地下载,目前仅兼容 Windows 系统。
-
下载链接:https://files.seeedstudio.com/wiki/reCamera/models/SpireView-v5.3.2.zip
-
项目开源地址:jario-jin/SpireView
步骤 1:创建数据集文件夹结构
- 按以下结构创建空文件夹(图像可从网络下载或自行拍摄,对比例、格式、大小无特殊要求):
data/ # 数据集根目录
├── test/ # 测试集(占比 10%)
│── train/ # 训练集(占比 70%)
│── valid/ # 验证集(占比 20%)
│── data.yaml # 配置文件:包含数据集路径、类别及元数据
- 将收集的图像按 1:7:2 的比例(测试集:训练集:验证集)分别放入对应文件夹。
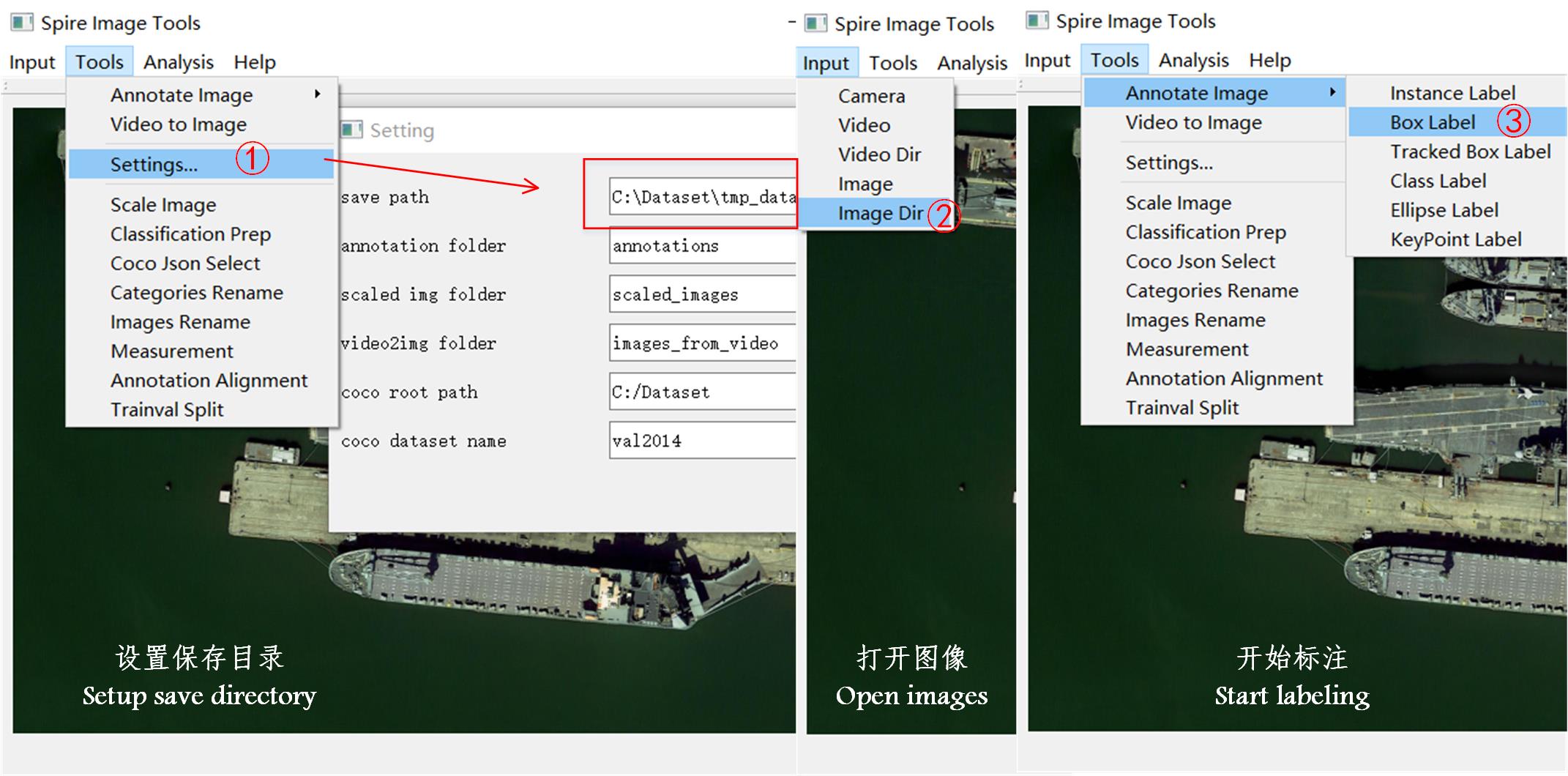
步骤 2:使用 SpireView 标注图像
- 打开 SpireView 软件,对 test、train、valid 三个文件夹中的图像分别标注(标注方法一致,需注意切换文件夹路径):
-
保存路径:设置为对应 “test”“train”“valid” 文件夹的目录;
-
图像路径:选择按比例划分好的图像所在目录。

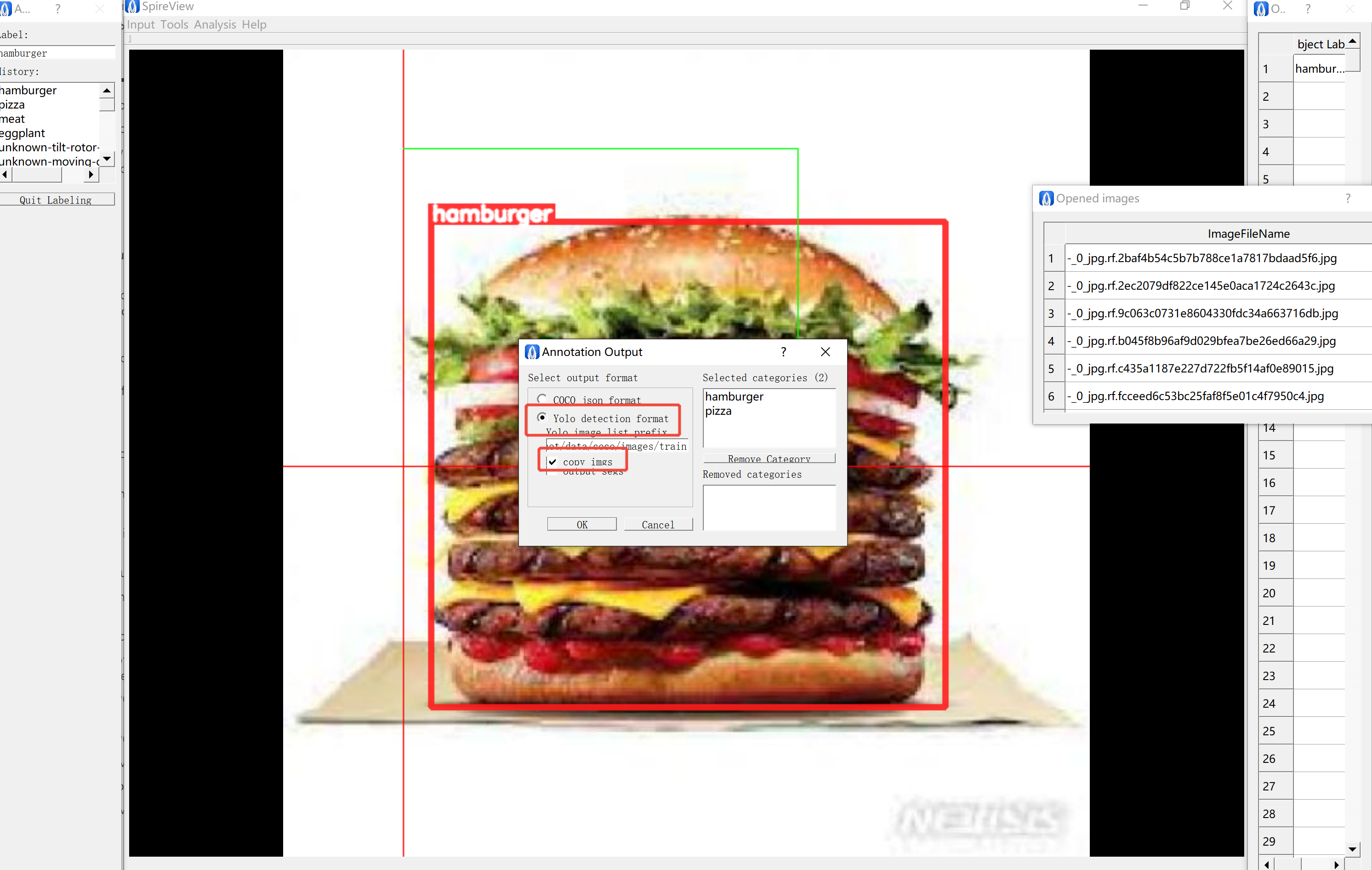
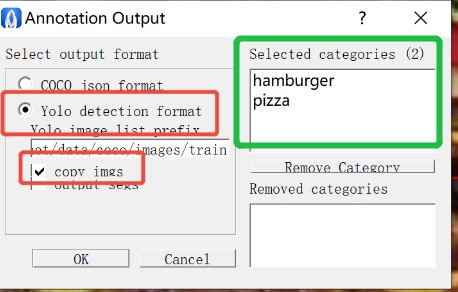
- 标注完成后,按键盘 “Ctrl + O”,选择 “Yolo 格式” 和 “Copy imgs”(复制图像)选项,点击 “确定”:
步骤 3:整理标注结果
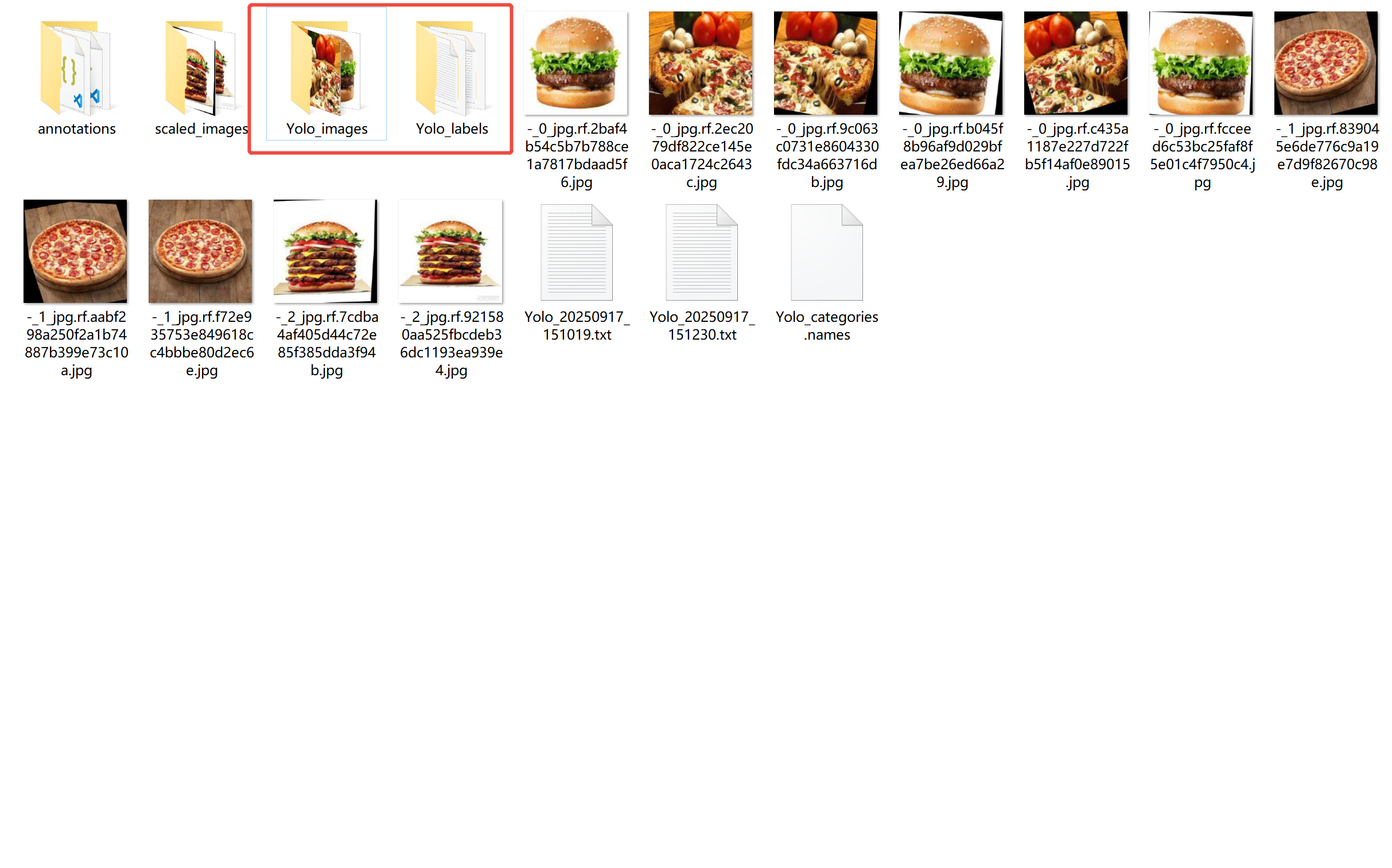
-
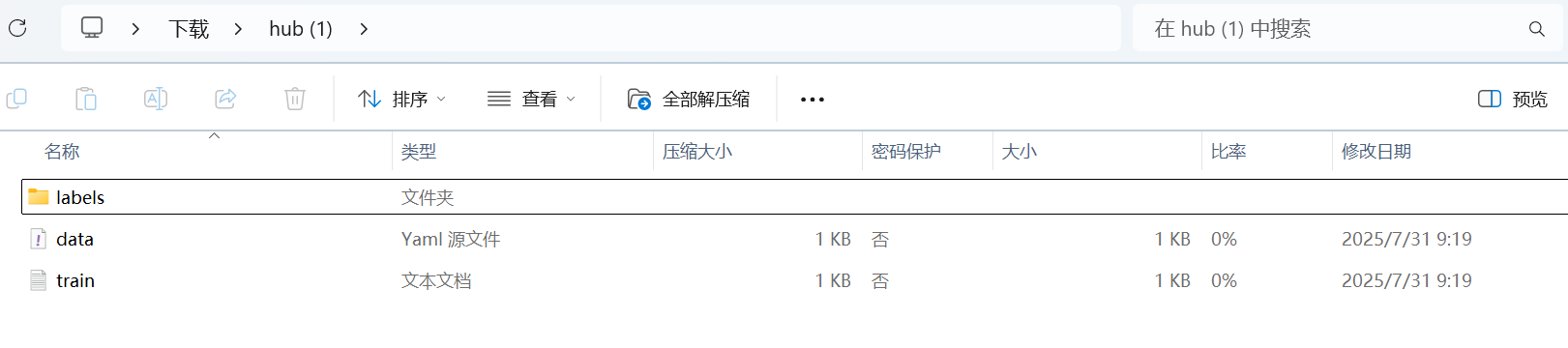
标注后,仅保留目录中的 “Yolo_images” 和 “Yolo_labels” 文件夹,删除其他文件;
-
将 “Yolo_images” 重命名为 “images”,“Yolo_labels” 重命名为 “labels”:
步骤 4:配置 data.yaml 文件
在数据集根目录添加 data.yaml 文件,内容示例如下(需根据实际标签修改):
train: ../train/images
val: ../valid/images
test: ../test/images
nc: 2 # 标签类别数量
names: ['hamburger','pizza'] # 标签名称,替换为实际标注标签
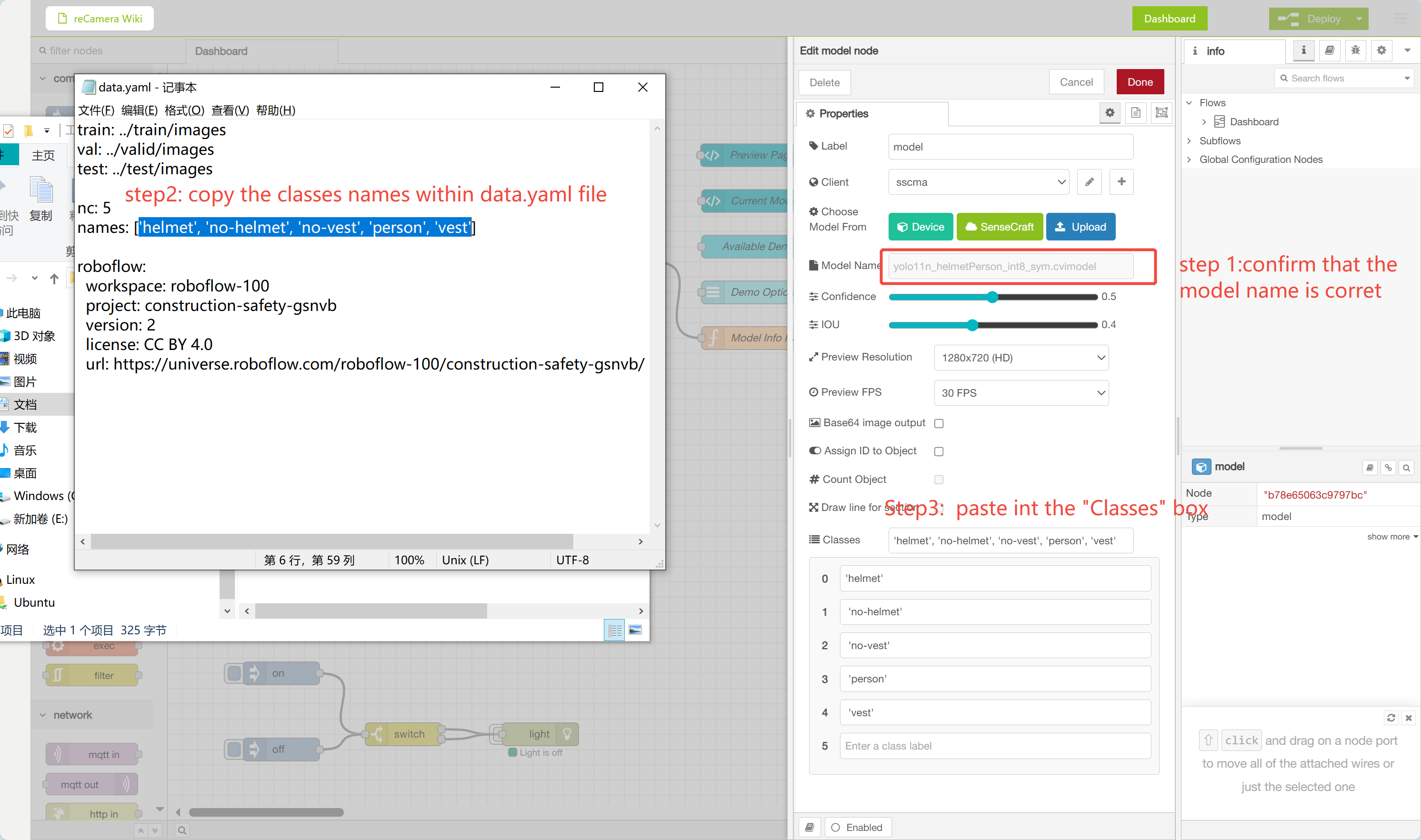
- “names” 中的标签名称需与标注时设置的标签一致(对应下图绿框内内容):
最终数据集结构
data/ # 数据集根目录
├── test/ # 测试集
│ ├── images/ # 图像文件
│ └── labels/ # 标签文件
│── train/ # 训练集
│ ├── images/ # 图像文件
│ └── labels/ # 标签文件
│
│── valid/ # 验证集
│ ├── images/ # 图像文件
│ └── labels/ # 标签文件
│
│── data.yaml # 配置文件:包含数据集路径、类别及元数据
最后,将整理好的数据集压缩为 .zip 文件夹,将在第二步:训练 Yolo11n 模型中使用。
(可选)使用 reCamera 获取图像数据集
阅读本部分前,请先了解 选项 1:reCamera 基础款。
可使用 reCamera 拍摄图像,标注为自有数据集,再训练并选择适配 reCamera 的模型。

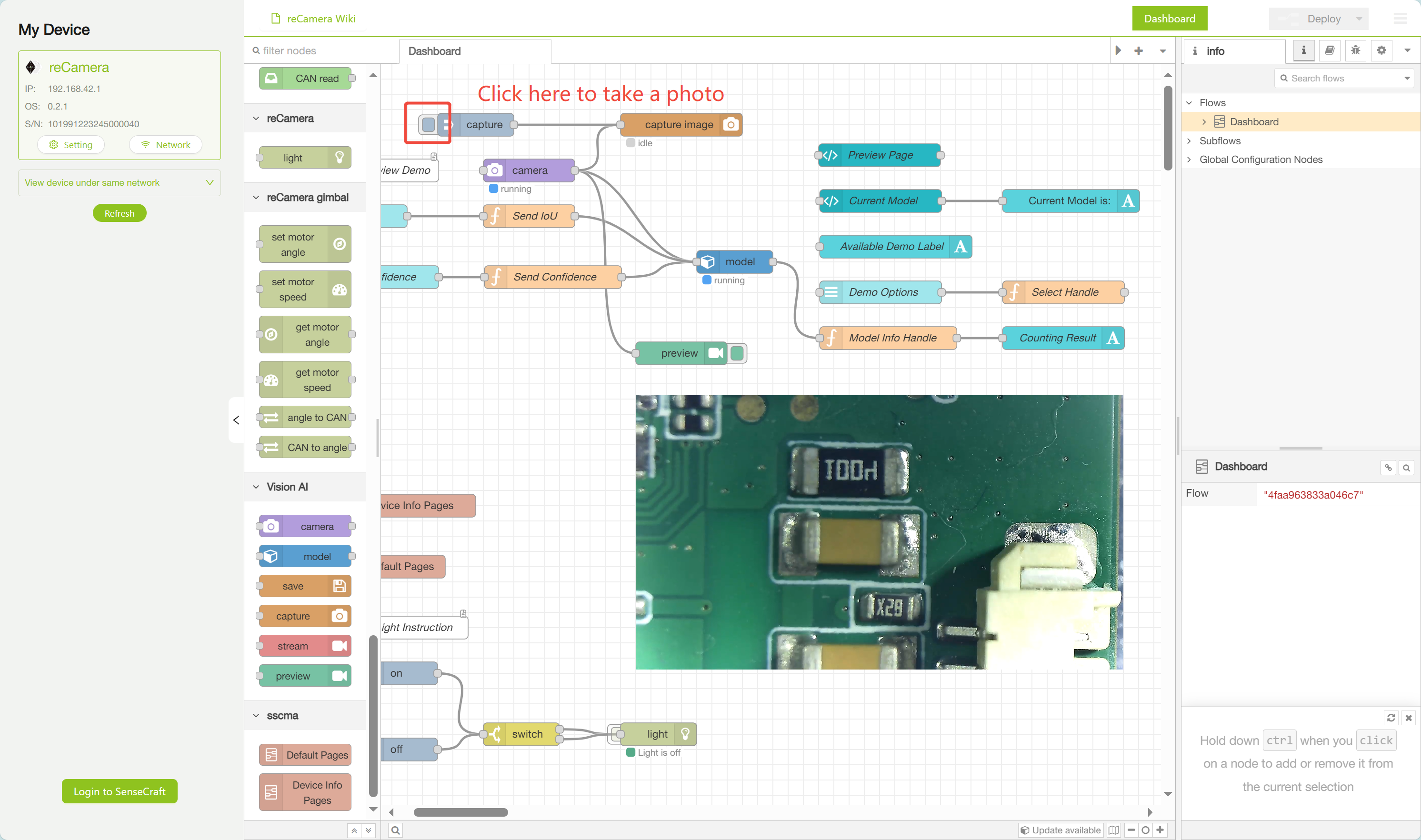
访问 http://192.168.42.1/#/files 可预览和下载拍摄的照片:
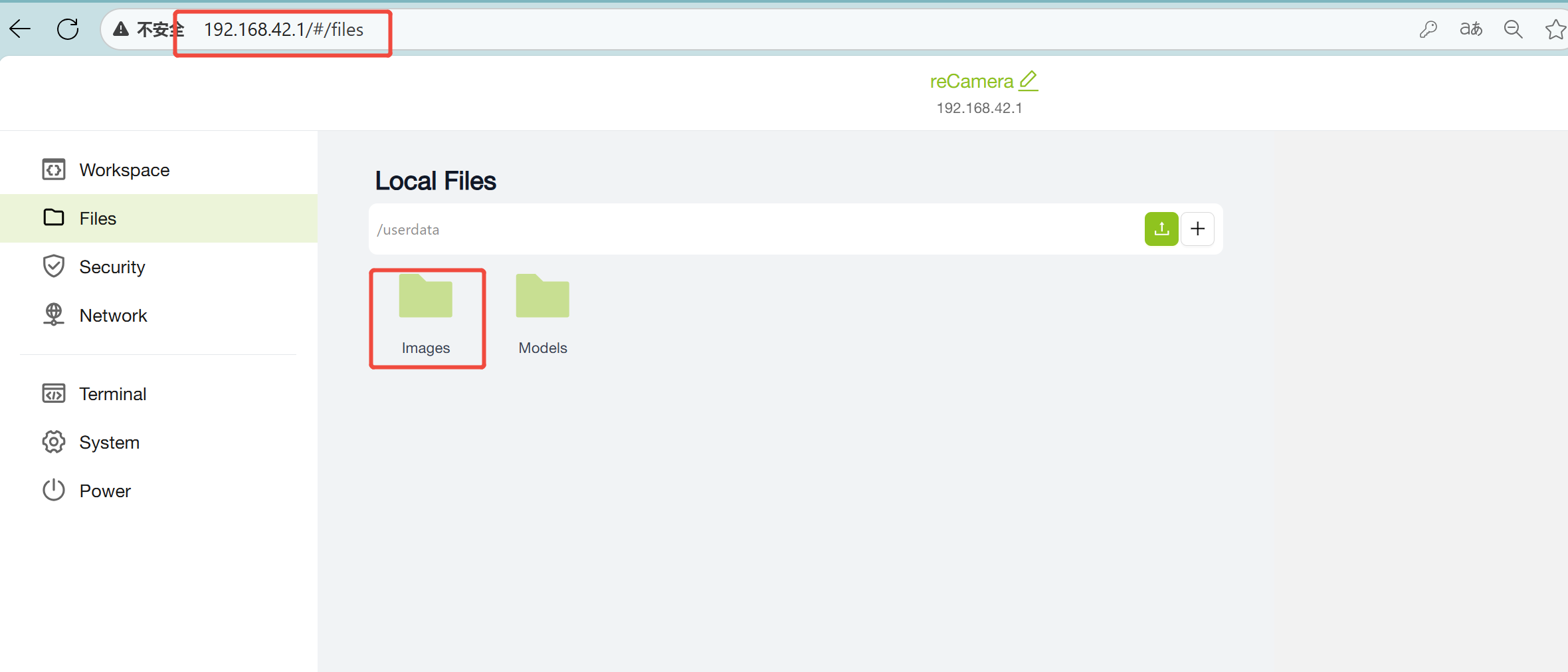
- 双击图像可查看预览;

- 右键点击图像可选择 “下载” 或 “删除”。

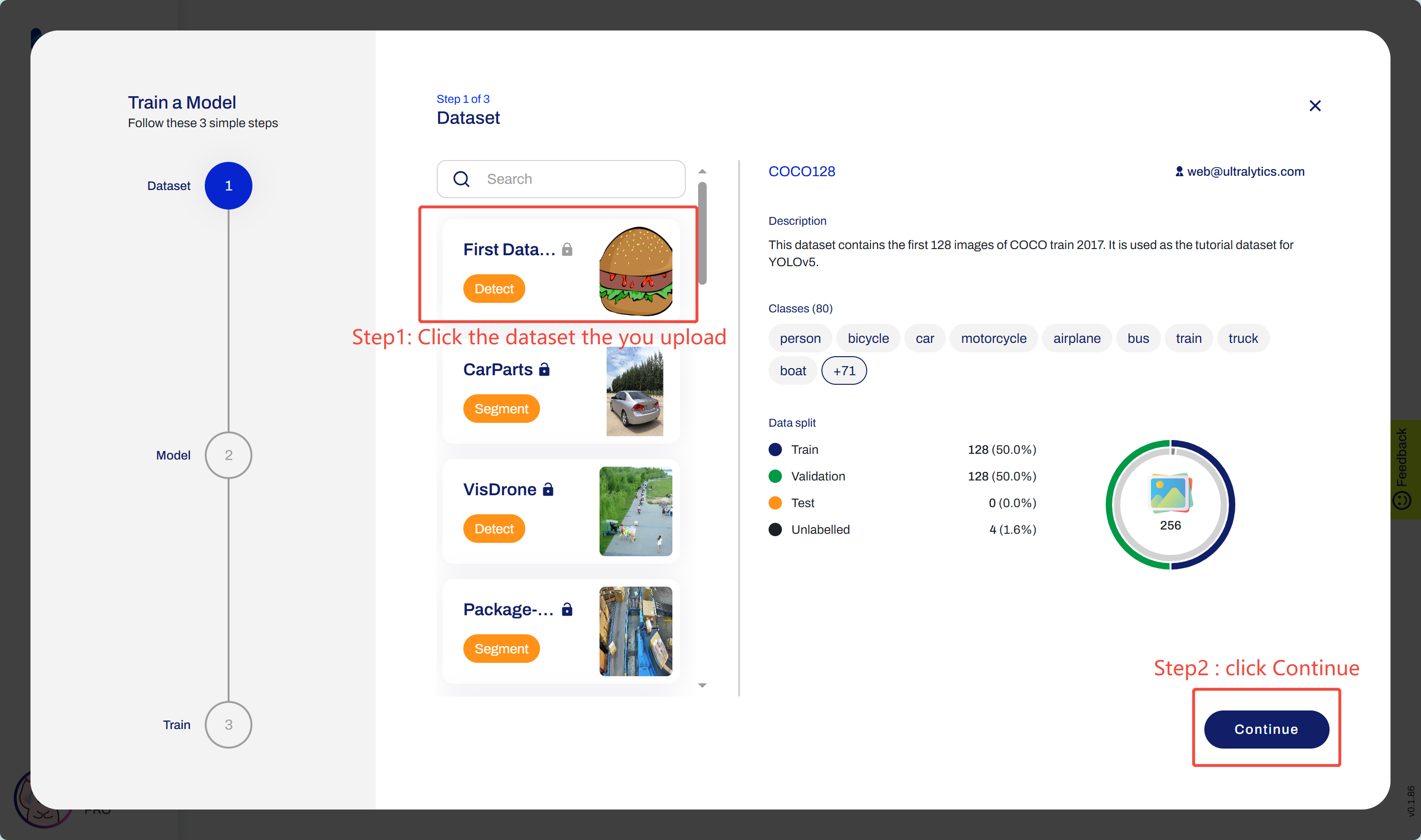
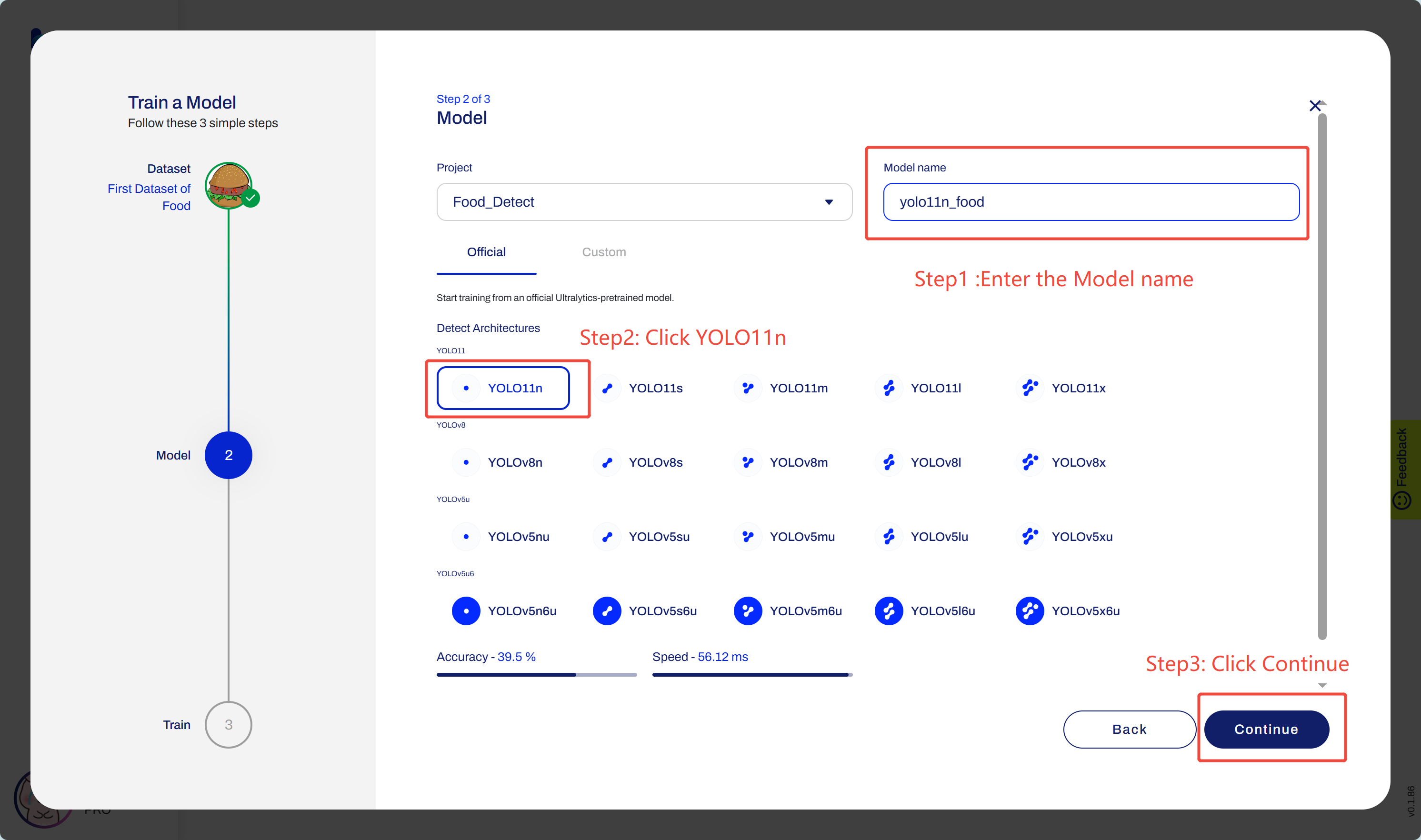
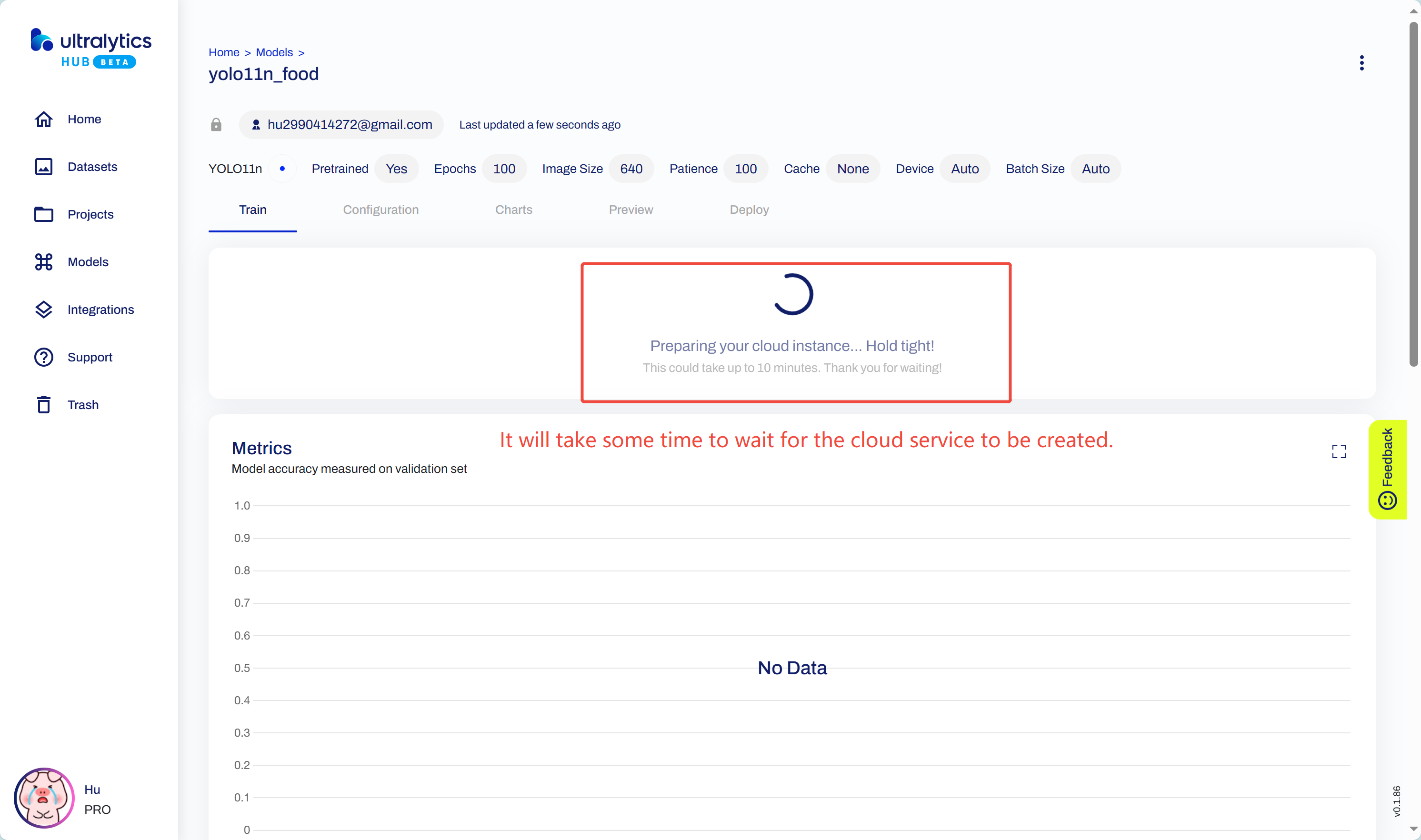
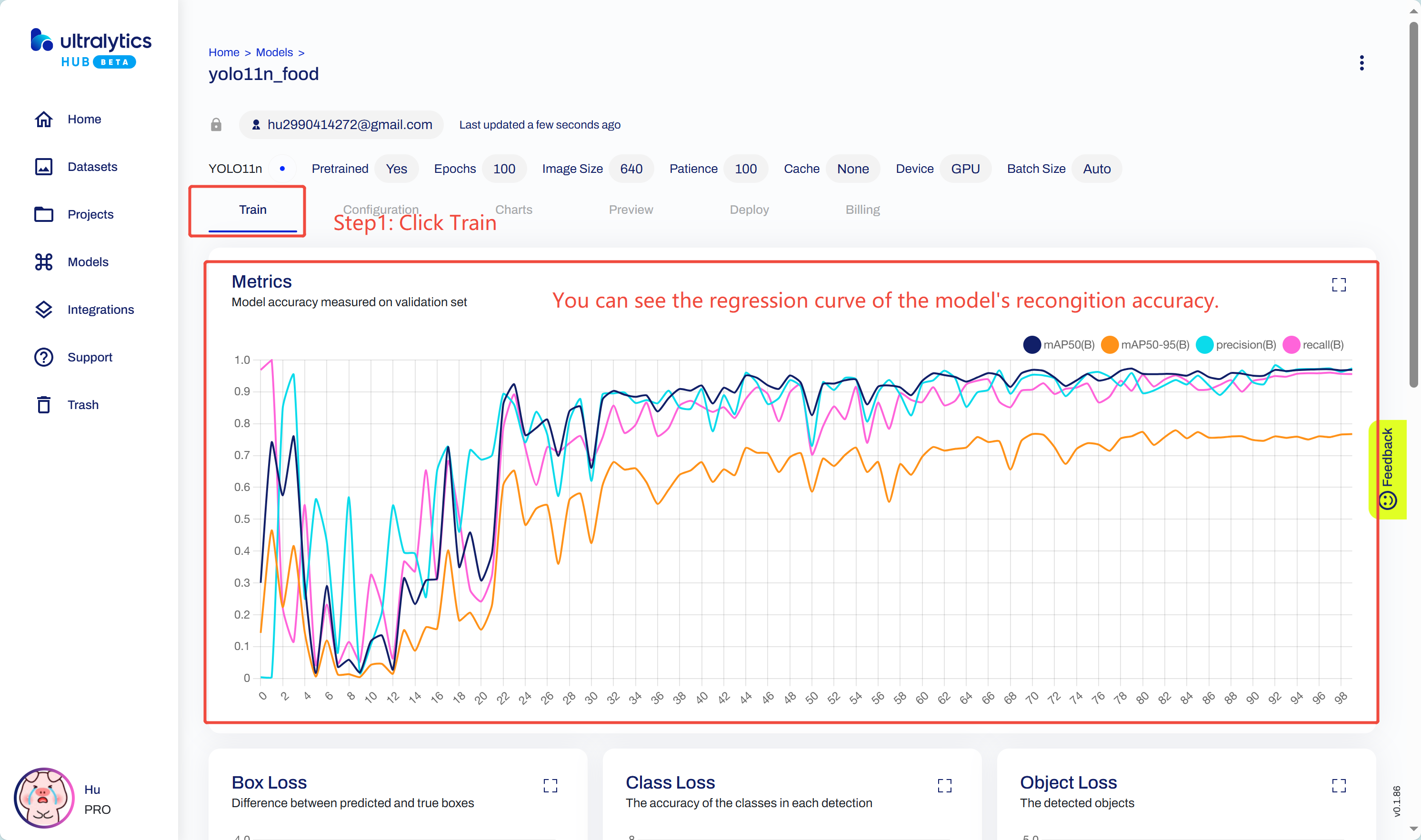
第二步:训练 Yolo11n 模型
Ultralytics Yolo 已搭建用于模型训练的在线平台 Ultralytics HUB。通过上传数据集,可快速完成模型训练,并以多种格式导出模型文件。
步骤 1:登录平台
- 可使用 Google 账号、GitHub 账号、Apple ID 或邮箱注册新账号。
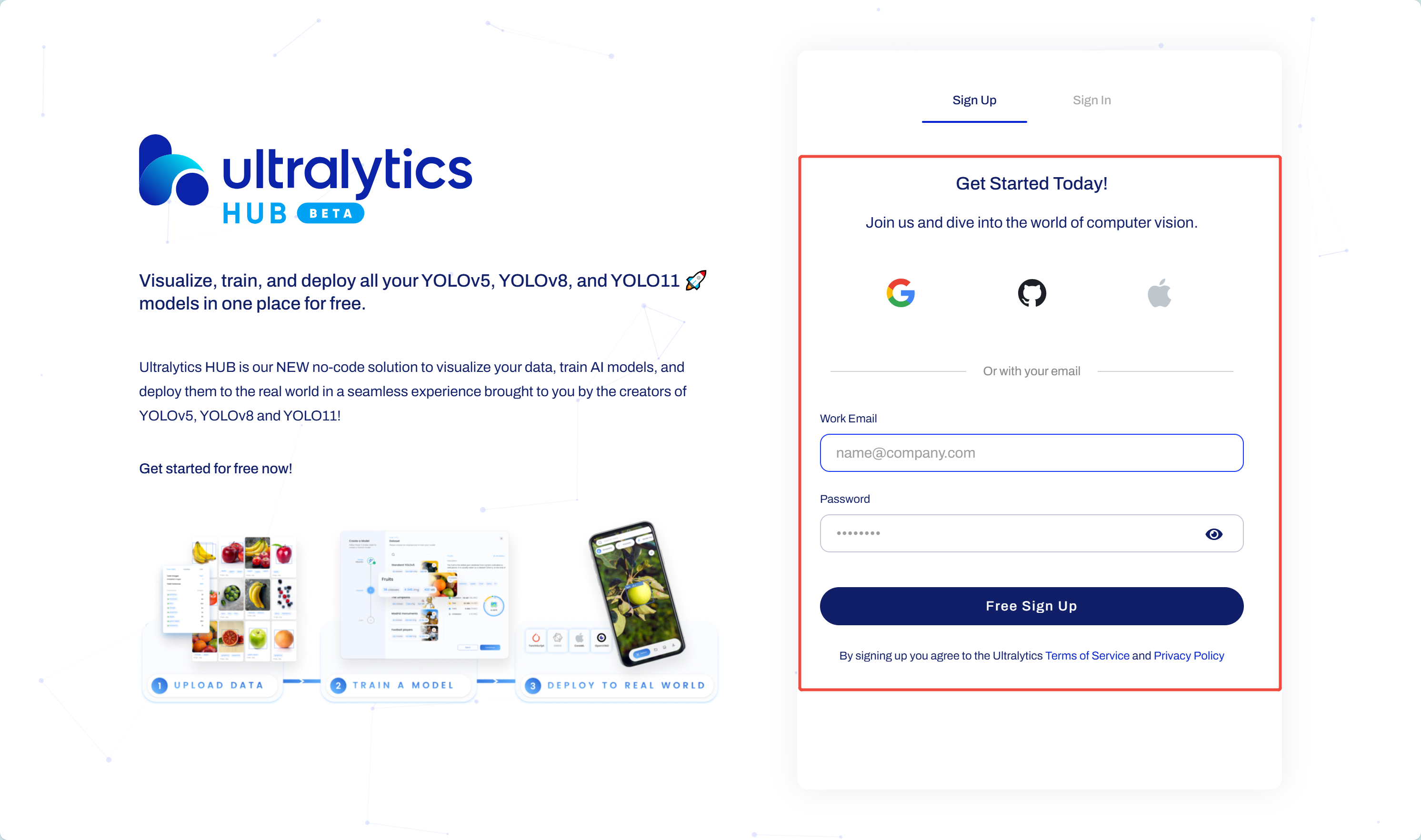
-
注册完成后,登录该平台。
-
登录成功后,注册所用的工作邮箱(WorkEmail)即为你的账号名。
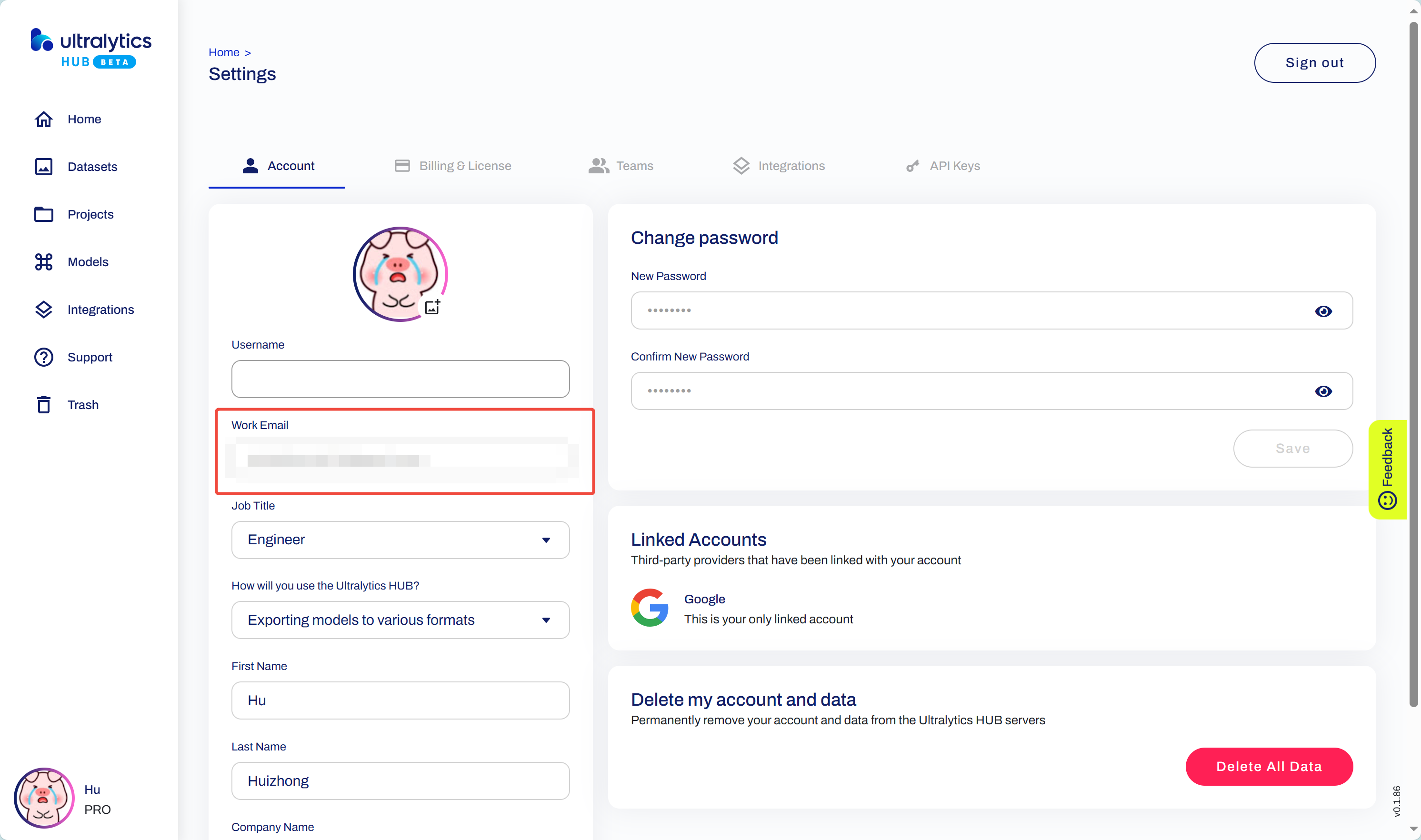
- 若你的账号尚未升级至 PRO 版本,请将你的账号信息告知现场工作人员,他们将为你升级至 PRO 版本(有效期约 1 个月)。

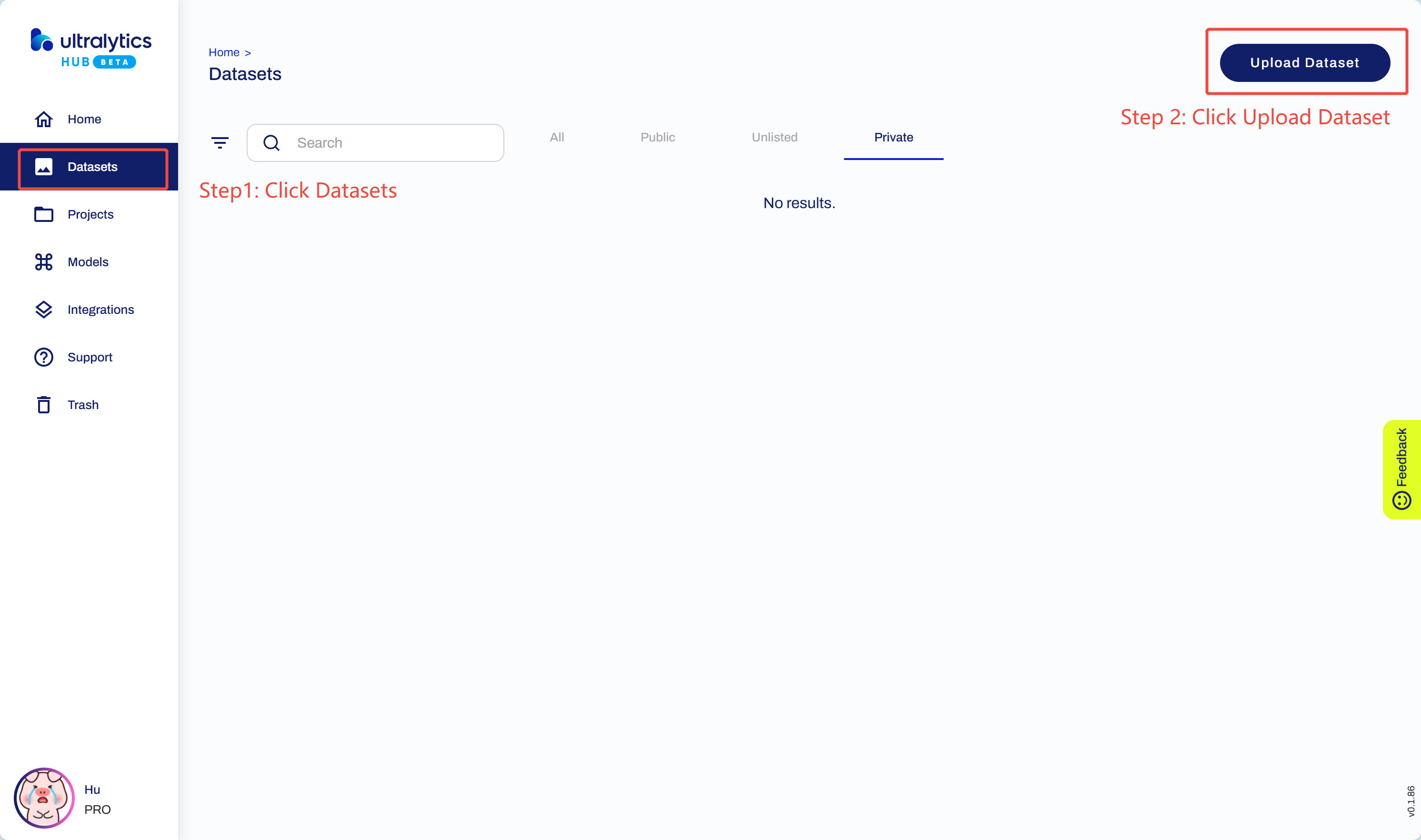
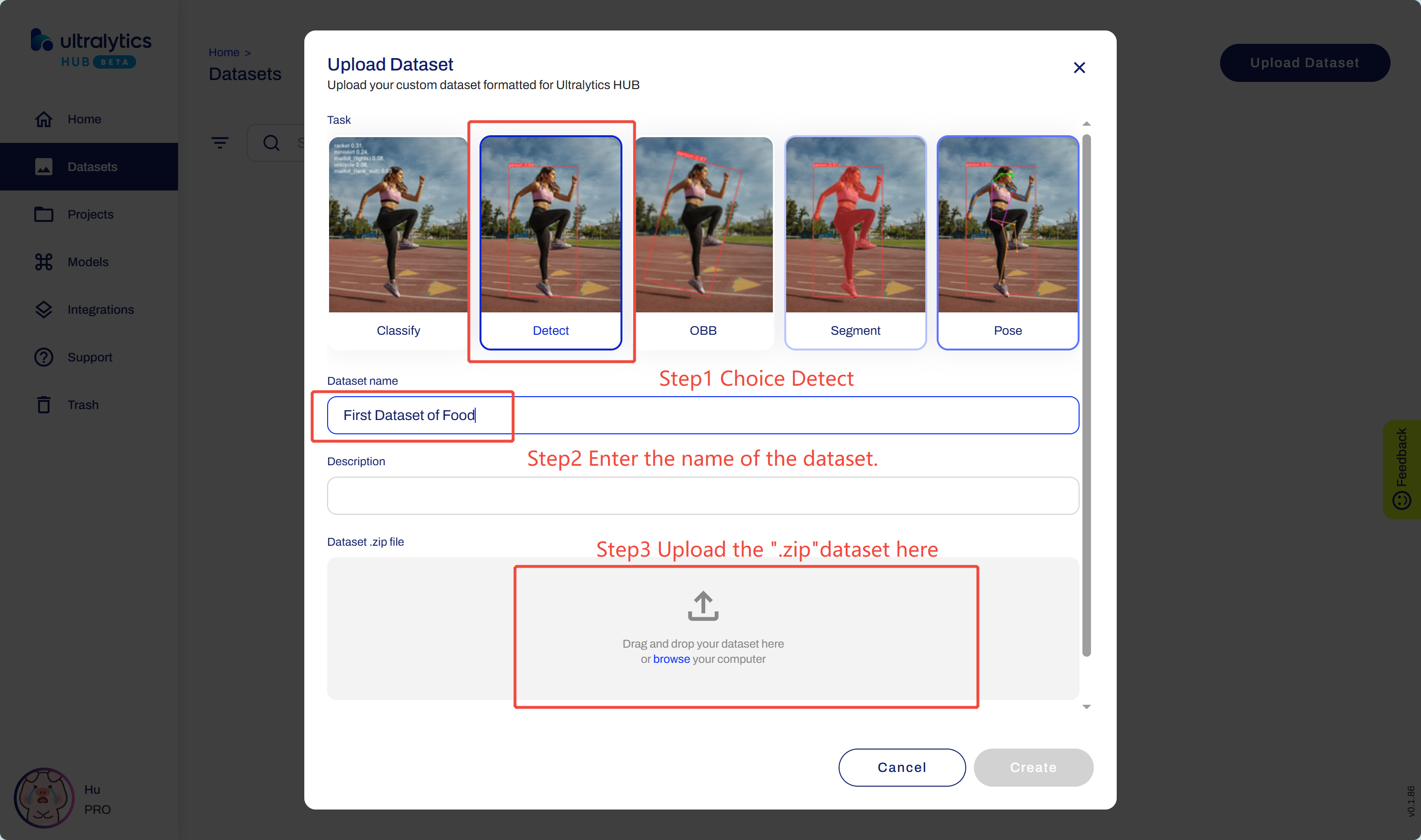
步骤 2:上传数据集
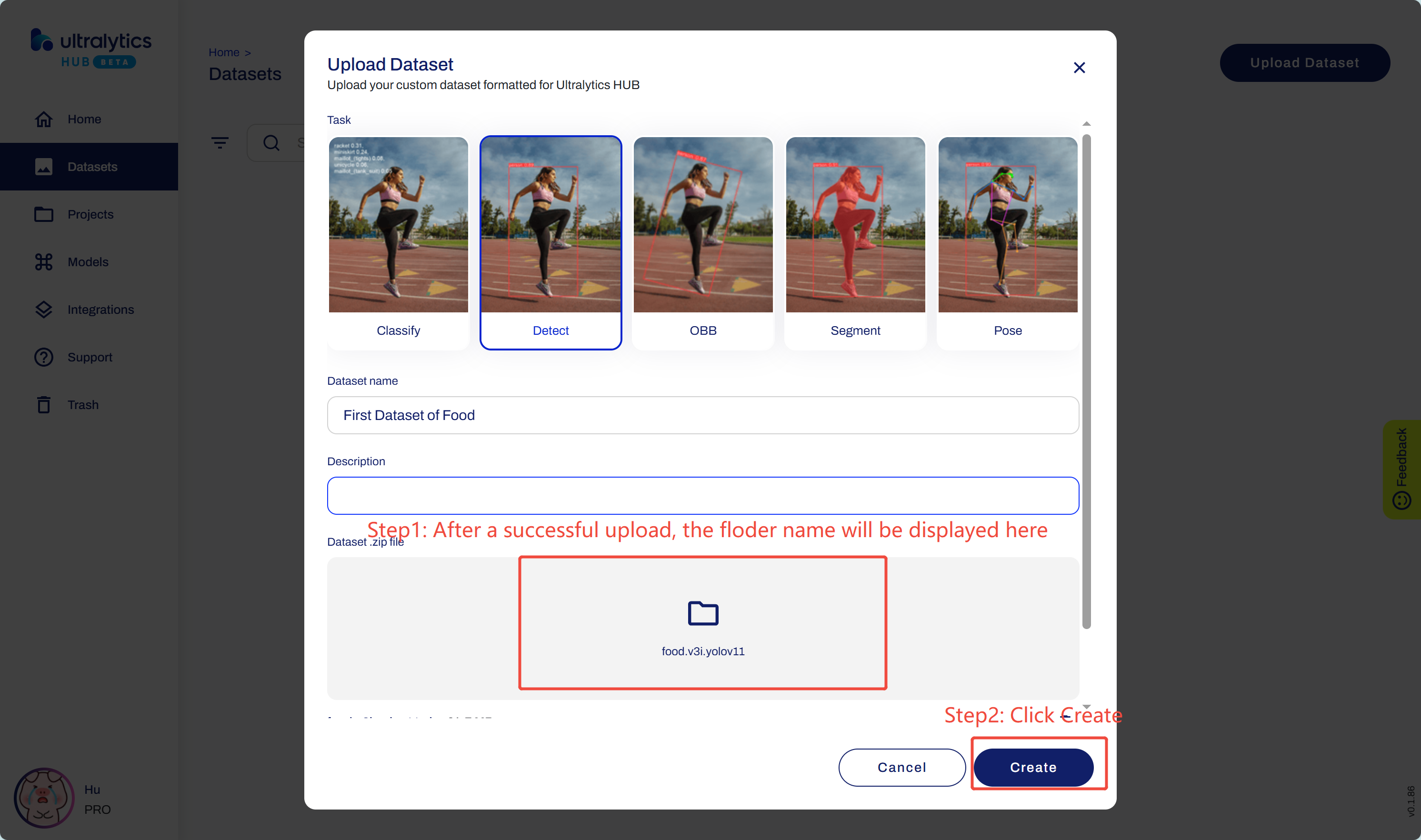
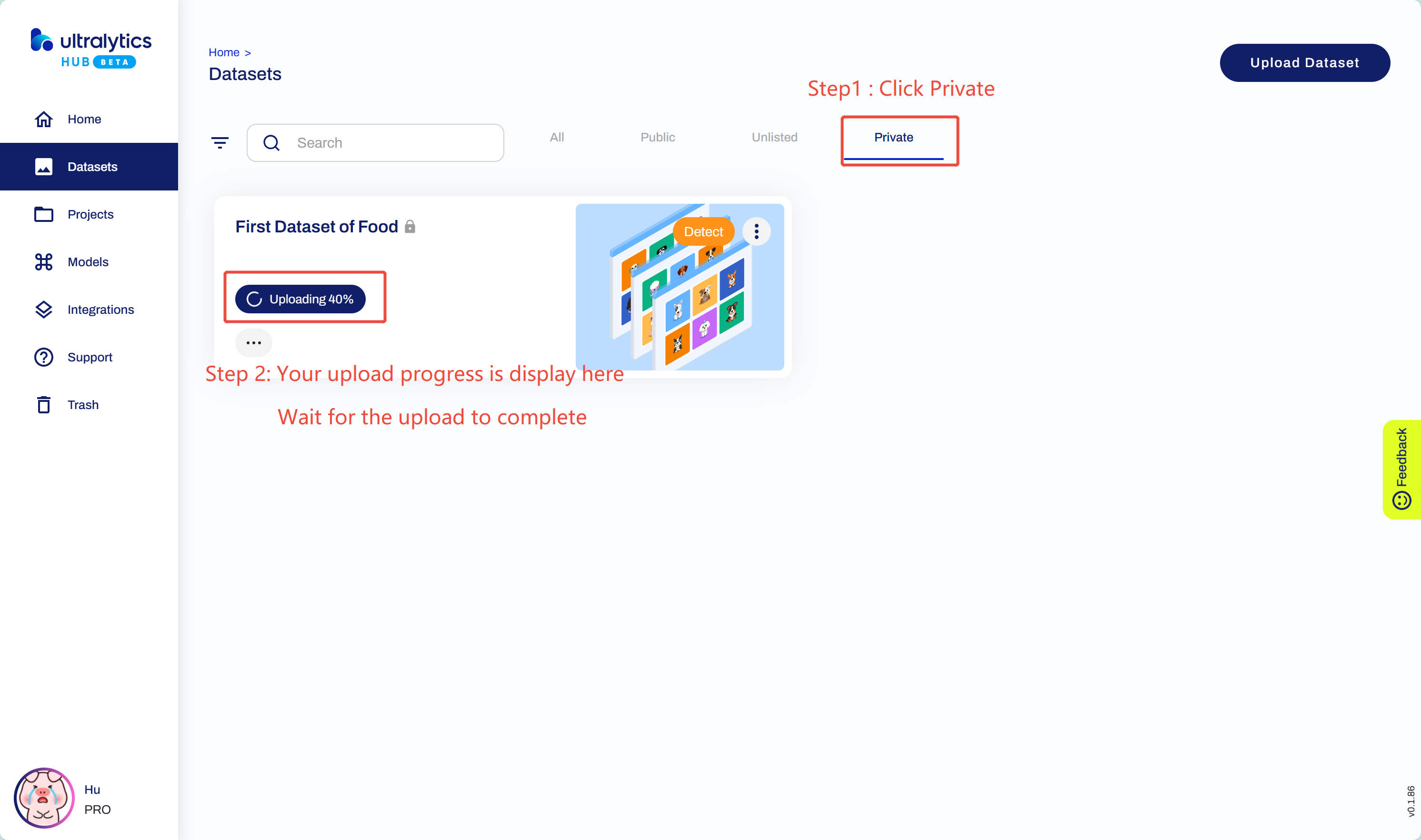
最终,数据集上传完成后,页面将显示如下,此时可进入下一步操作。

步骤 3:创建项目
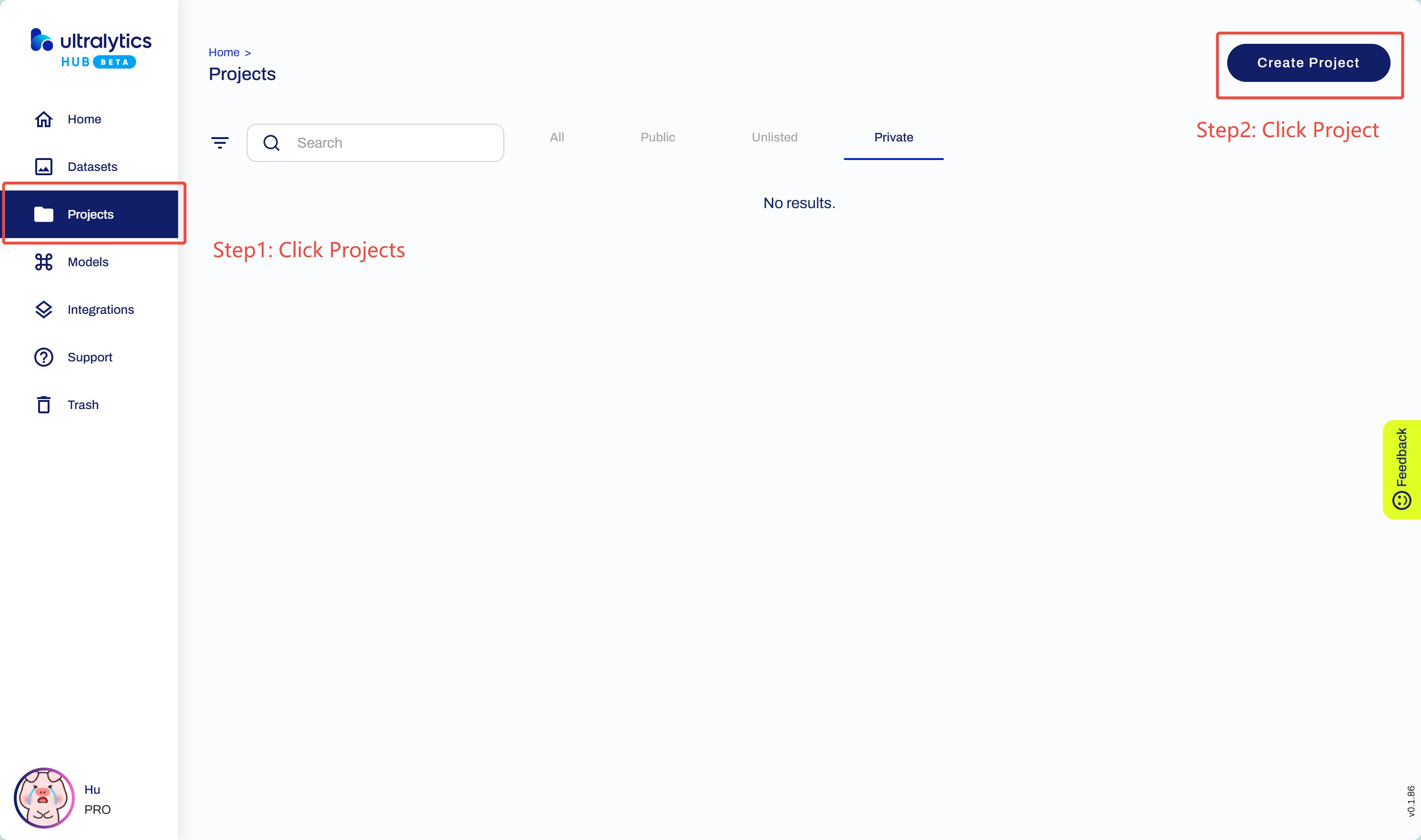

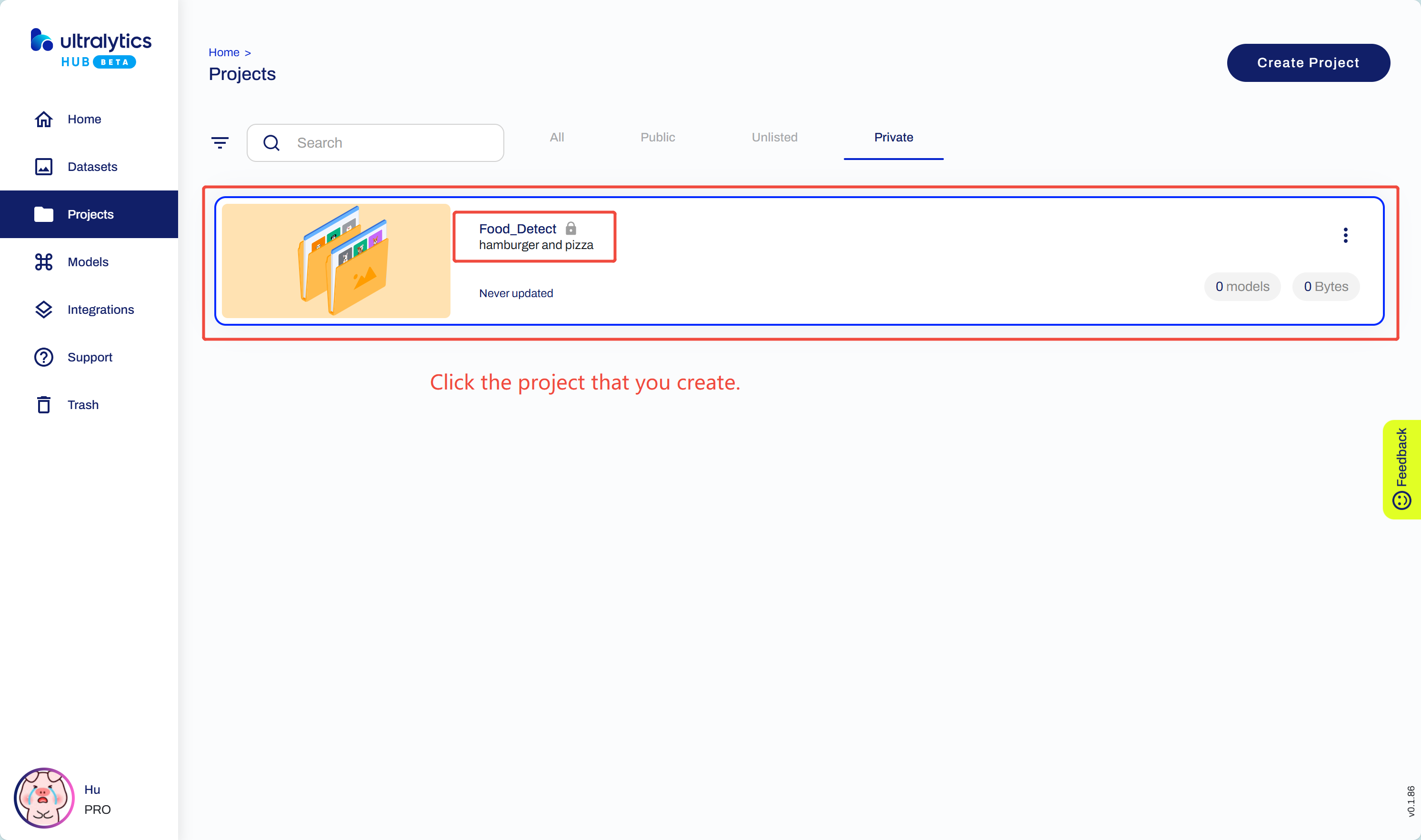

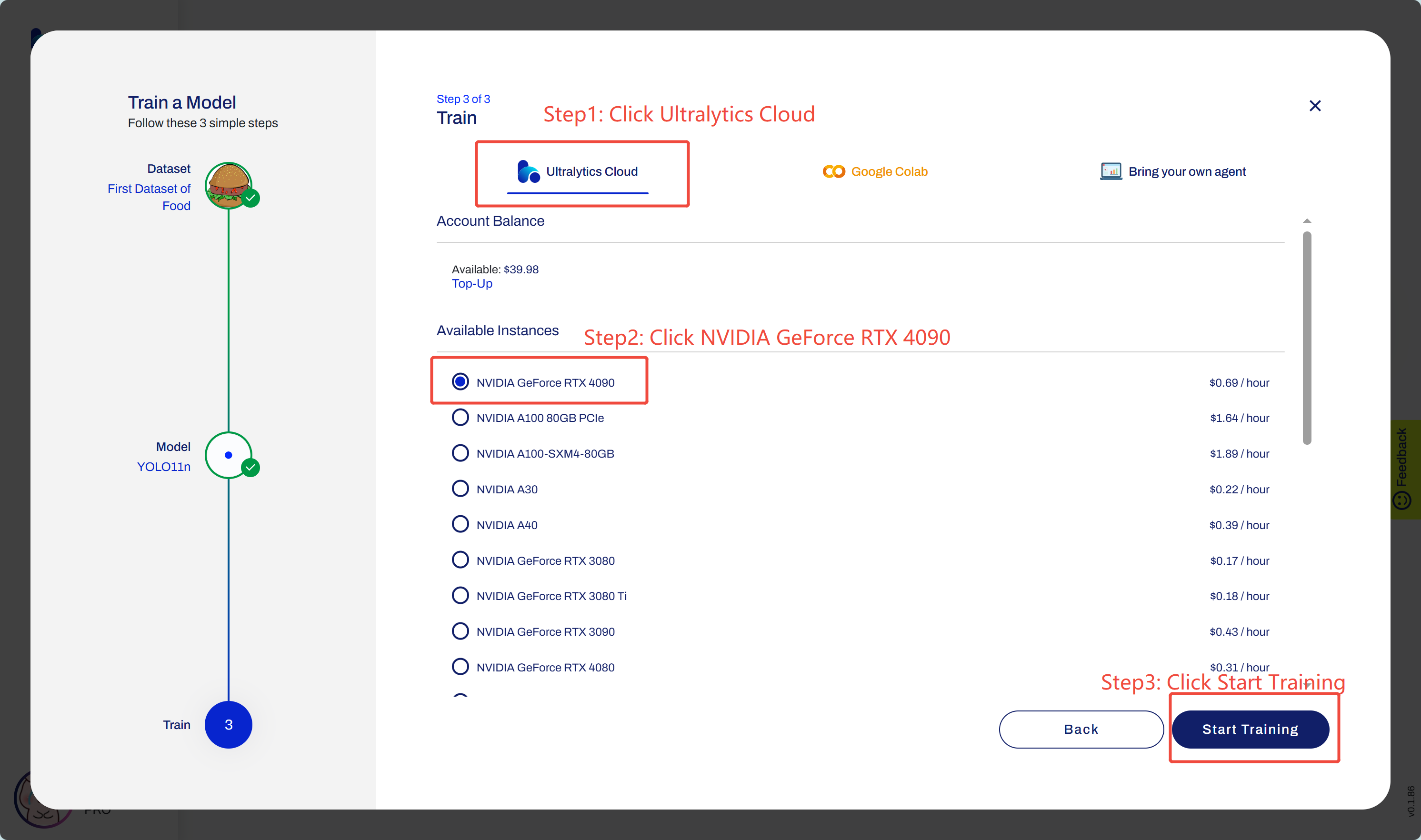
最终,项目创建完成后页面将显示如下,此时可进入下一步操作。
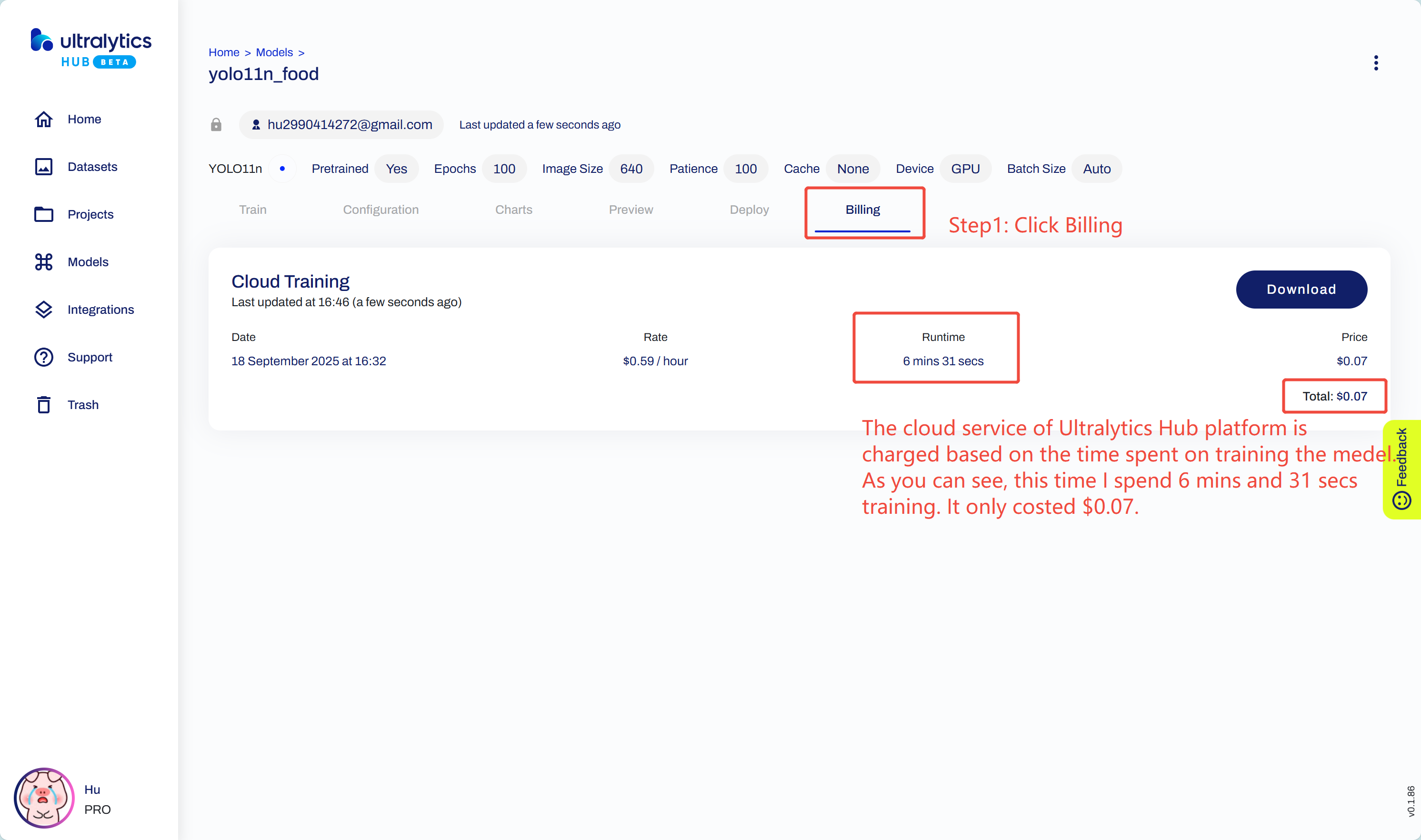
Ultralytics HUB平台按模型训练时长计费,价格优惠,欢迎大家使用该平台训练自定义模型。
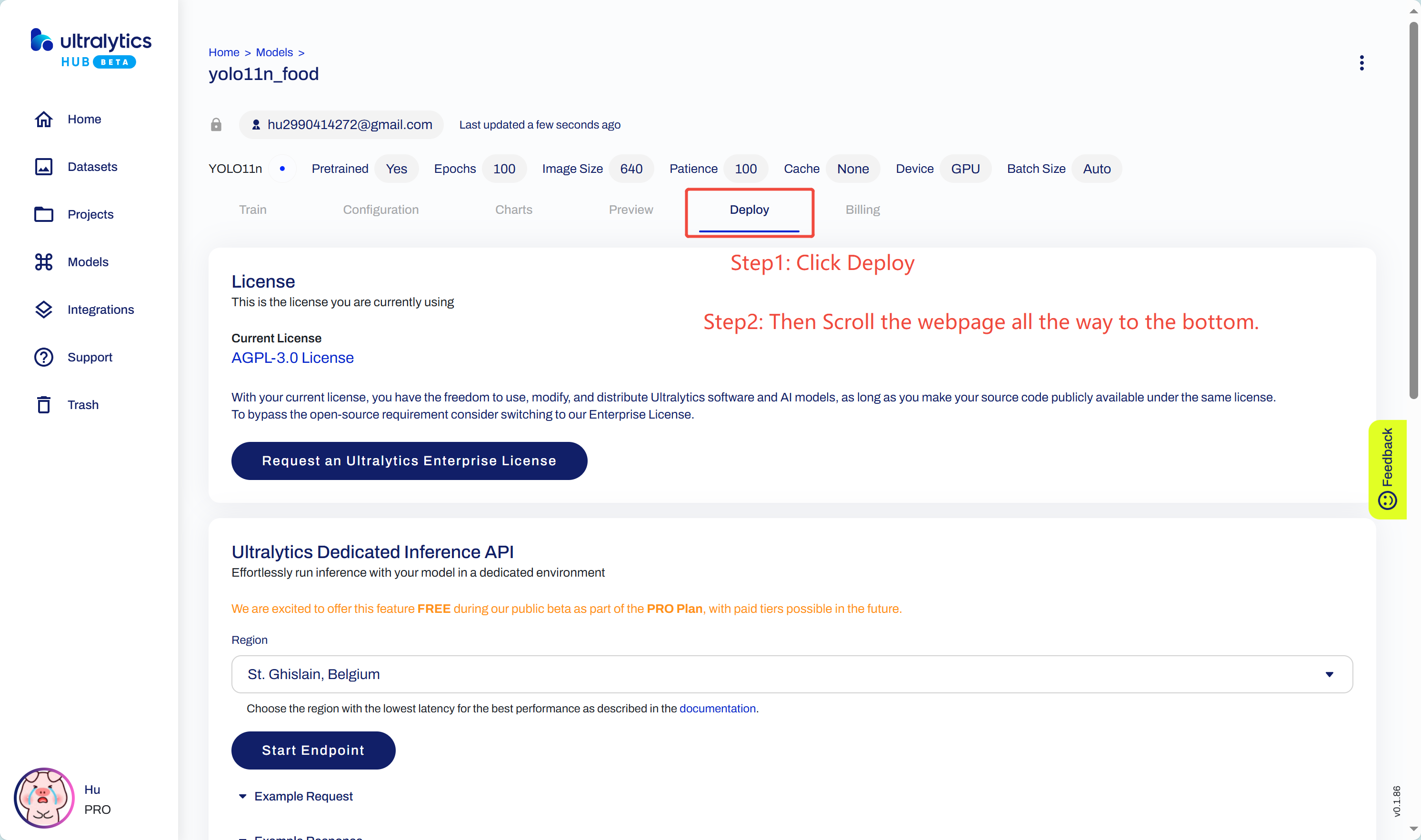
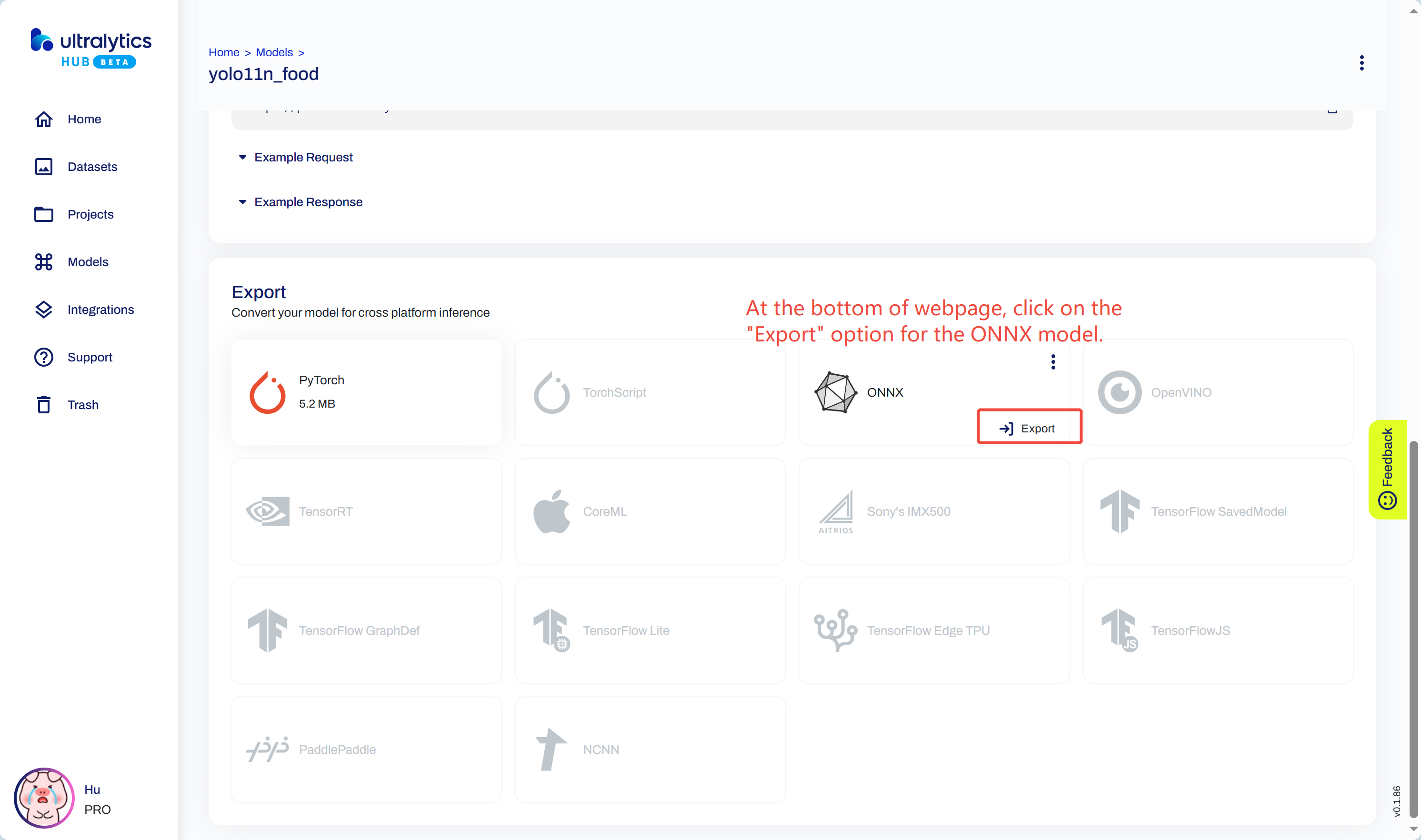
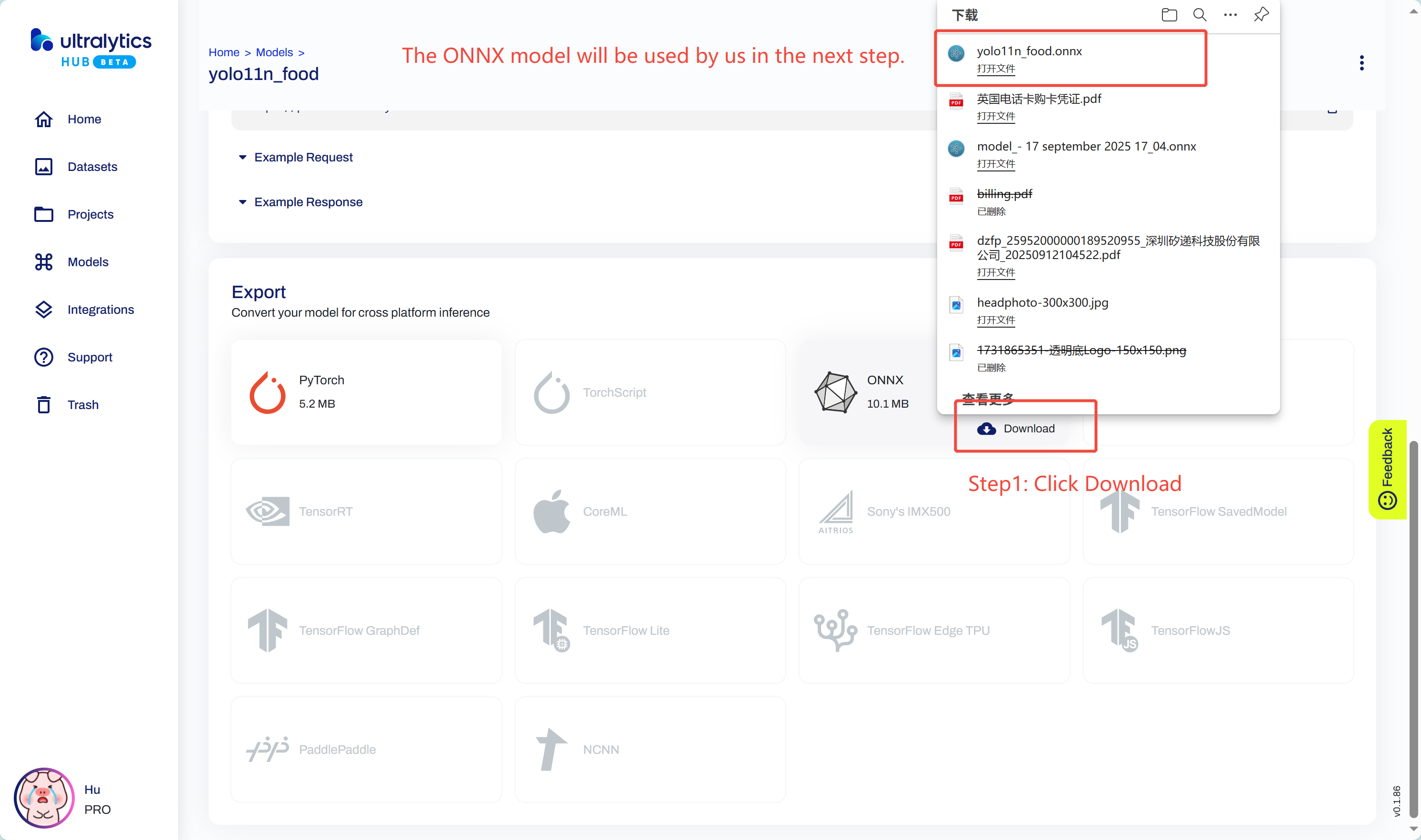
步骤 4:下载 ONNX 模型
最终,需按以下结构整理文件,为下一步操作做准备:
-
COCO2017 文件夹:用于存放校准数据集,需从你的数据集中复制 100 张图片放入该文件夹;
-
image 文件夹:用于存放测试图片,需从你的数据集中复制 1 张图片,并将其重命名为 “test.jpg”;
-
Workspace 文件夹:用于存放模型文件,将刚才下载的 ONNX 模型文件放入该文件夹。
model_yolo11n/
├── COCO2017/ # 校准数据集(100 张图片)
| └── Calibration1.jpg
| bration2.jpg
| ...
| libration100.jpg
├──image/ # 测试图片(1 张图片)
| └── test.jpg
└── Workspace/
└── yolo11n_food.onnx # ONNX 模型(刚下载的 ONNX 模型文件)
文件准备完成后,进入 第三步:模型转换与部署
第三步:模型转换与部署
搭建工作环境
注意:你的计算机需运行 Linux 系统,或可使用 WSL(Windows 子系统)。
若你不具备相关技术能力,请将上一步准备好的文件夹发送给现场工作人员,并跳过 “步骤 3:模型转换与部署”。
工作人员将协助你完成必要的模型转换,并发送一个以 “cvimodel” 为后缀的文件给你,该文件将在 第四步:模型部署到reCamera 中使用。
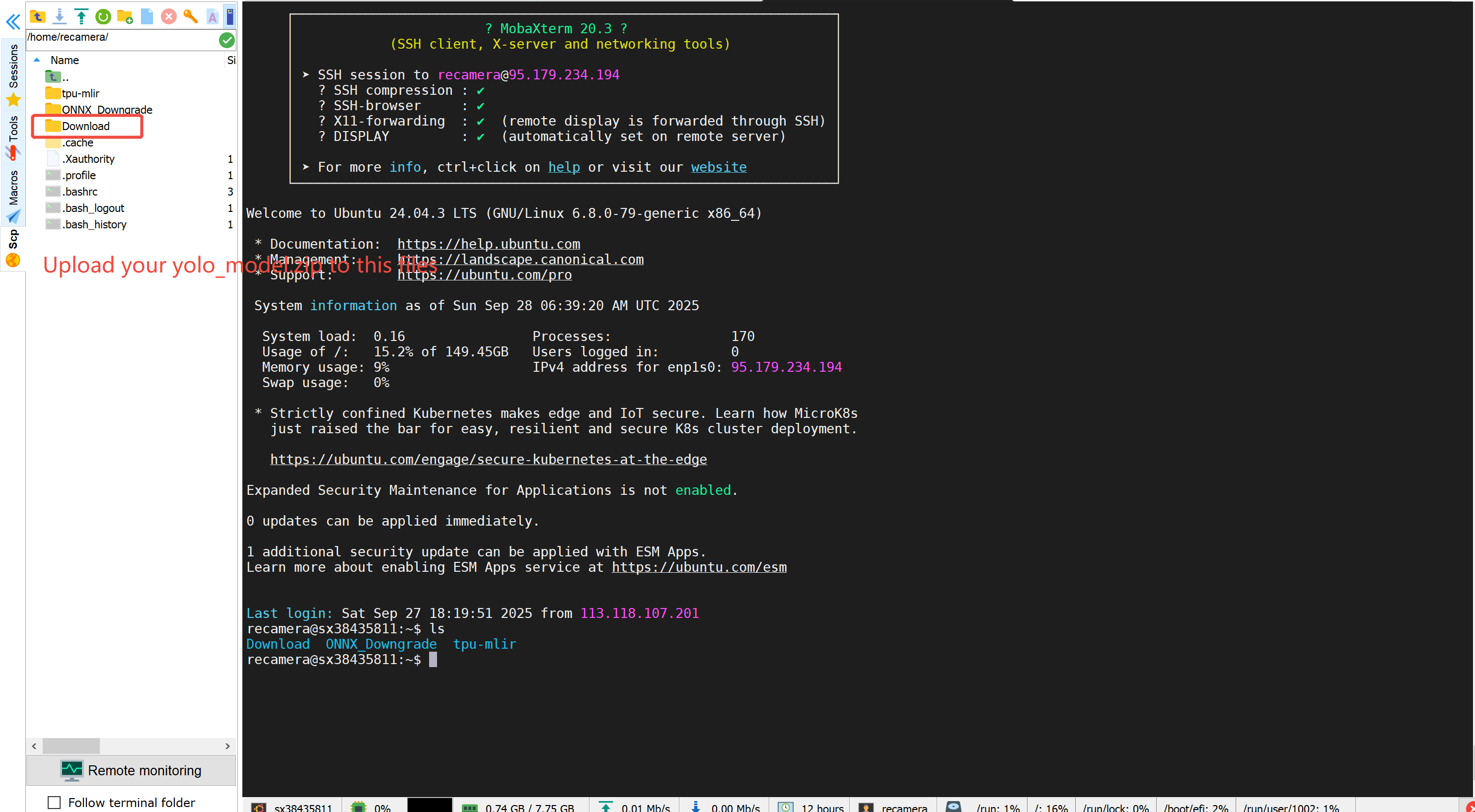
步骤 1:登录模型转换服务器
IP地址:95.179.234.194
用户名:recamera
密码:hebeucdio.413
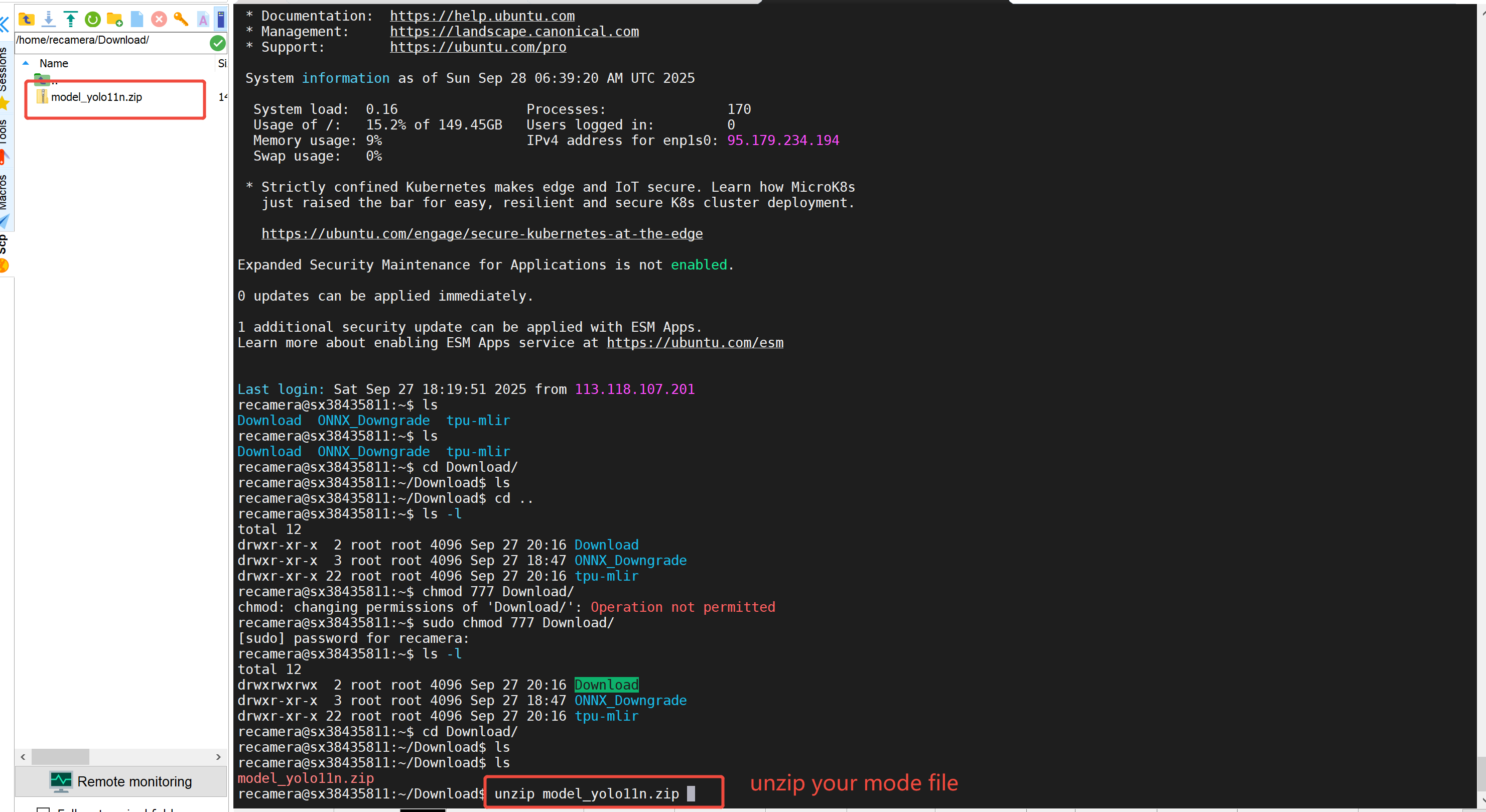
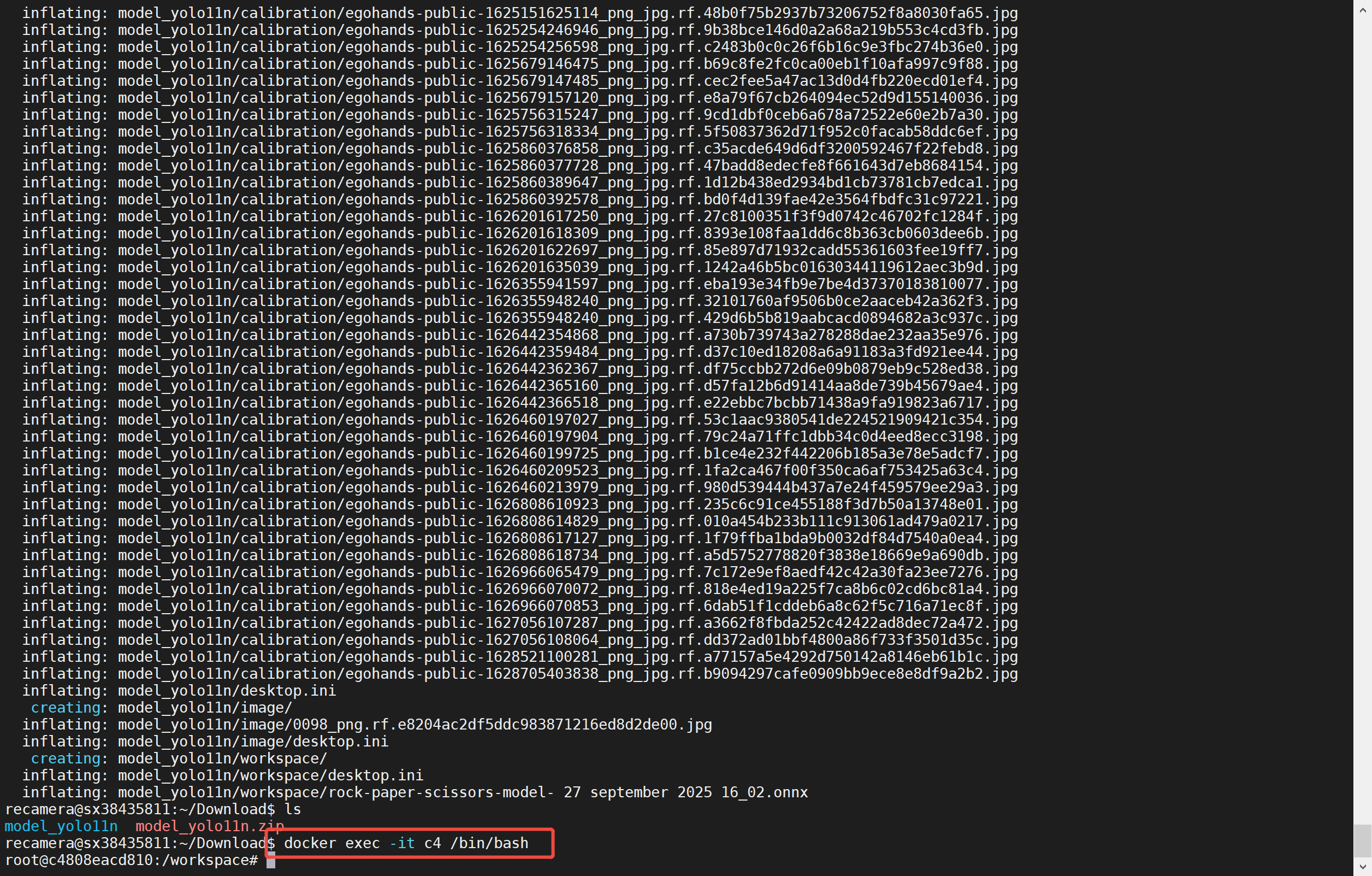
进入 Docker 容器:
docker exec -it c4 /bin/bash
将文件移动到工作目录:
mv Download/model_yolo11n tpu-mlir/
cd tpu-mlir/model_yolo11n/workspace/
步骤 2:准备工作空间
将上一步(即 步骤 4:下载 ONNX 模型)准备好的 model_yolo11n 文件夹复制到 tpu-mlir 目录下。
cd model_yolo11n
cd Workspace
确保文件夹内无文件缺失,目录结构如下:
model_yolo11n/
├── COCO2017/ # 校准数据集(100 张图片)
| └── Calibration1.jpg
| bration2.jpg
| ...
| libration100.jpg
├──image/ # 测试图片(1 张图片)
| └── test.jpg
└── Workspace/
└── yolo11n_food.onnx # ONNX 模型(刚下载的 ONNX 模型文件)
开始模型转换
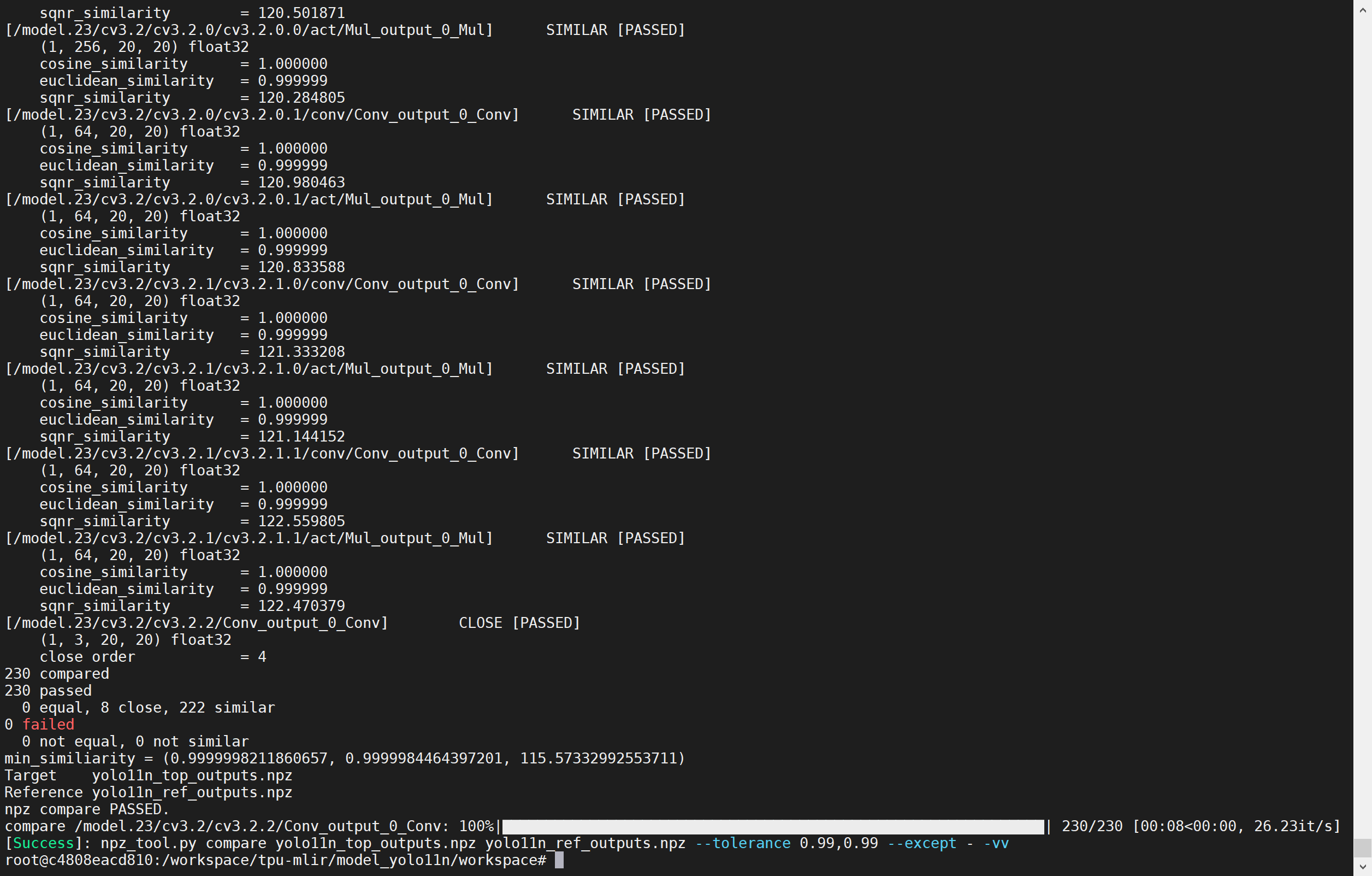
步骤 1:ONNX 转 MLIR 格式
模型版本降级:
python /workspace/tpu-mlir/downgrade_onnx.py yolo11n.onnx yolo11n_v8.onnx
在 Workspace 目录下执行以下命令:
model_transform \
--model_name yolo11n \
--model_def helmet_detect.onnx \
--input_shapes "[[1,3,640,640]]" \
--mean "0.0,0.0,0.0" \
--scale "0.0039216,0.0039216,0.0039216" \
--keep_aspect_ratio \
--pixel_format rgb \
--output_names "/model.23/cv2.0/cv2.0.2/Conv_output_0,/model.23/cv3.0/cv3.0.2/Conv_output_0,/model.23/cv2.1/cv2.1.2/Conv_output_0,/model.23/cv3.1/cv3.1.2/Conv_output_0,/model.23/cv2.2/cv2.2.2/Conv_output_0,/model.23/cv3.2/cv3.2.2/Conv_output_0" \
--test_input ../image/0101.jpg \
--test_result yolo11n_top_outputs.npz \
--mlir yolo11n.mlir
步骤 2:生成校准表
run_calibration \
yolo11n.mlir \
--dataset ../COCO2017 \
--input_num 100 \
-o yolo11n_calib_table

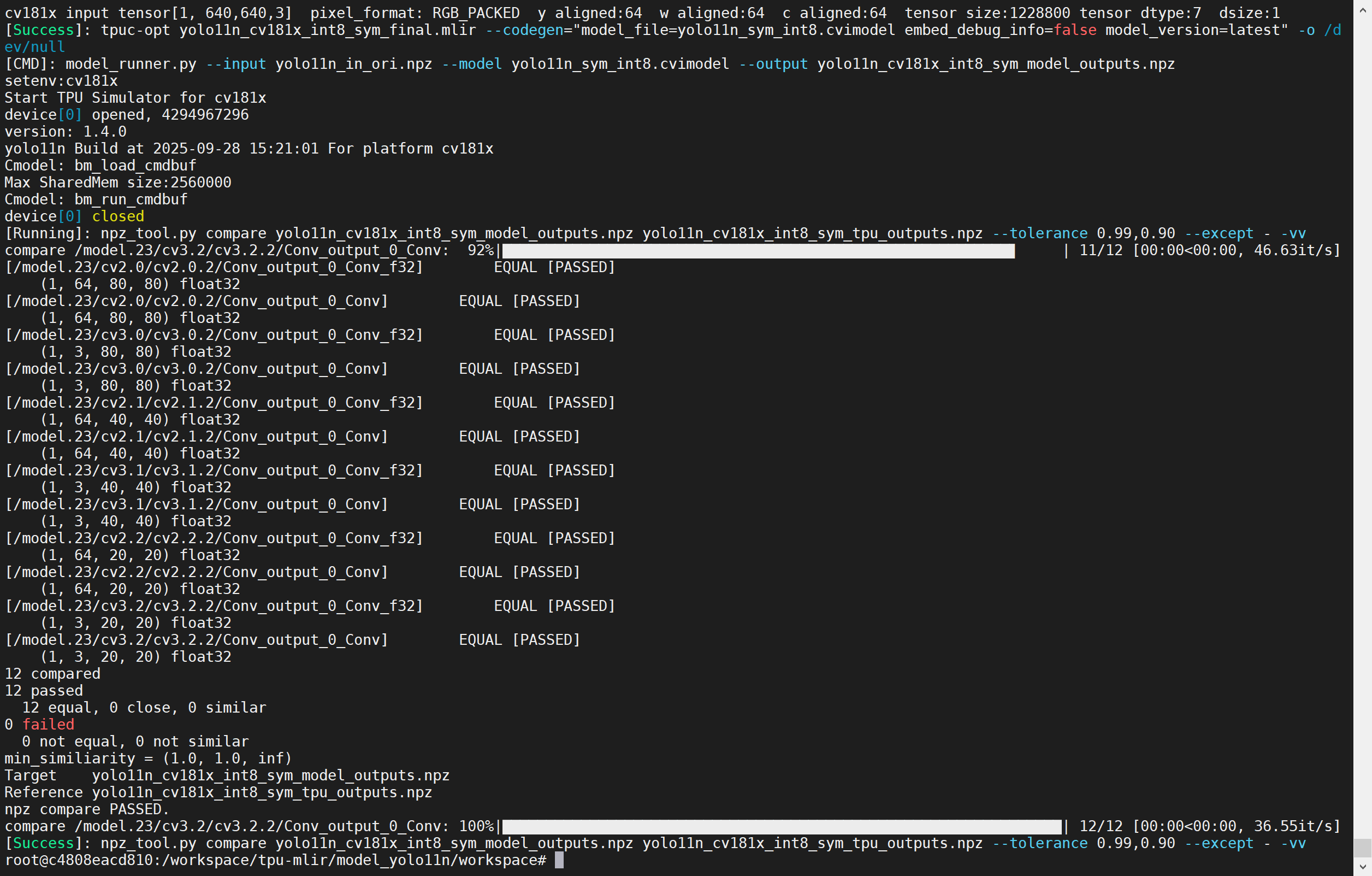
步骤 3:编译 INT8 模型
model_deploy \
--mlir yolo11n.mlir \
--quantize INT8 \
--quant_input \
--processor cv181x \
--calibration_table yolo11n_calib_table \
--test_input ../image/test.jpg \
--test_reference yolo11n_top_outputs.npz \
--customization_format RGB_PACKED \
--fuse_preprocess \
--aligned_input \
--model yolo11n_sym_int8.cvimodel
model_deploy \
--mlir yolo11n.mlir \
--quant_input \
--quantize F16 \
--customization_format RGB_PACKED \
--processor cv181x \
--test_input ../image/0101.jpg \
--test_reference yolo11n_top_outputs.npz \
--fuse_preprocess \
--tolerance 0.99,0.9 \
--model yolo11n_1684x_f16.cvimodel
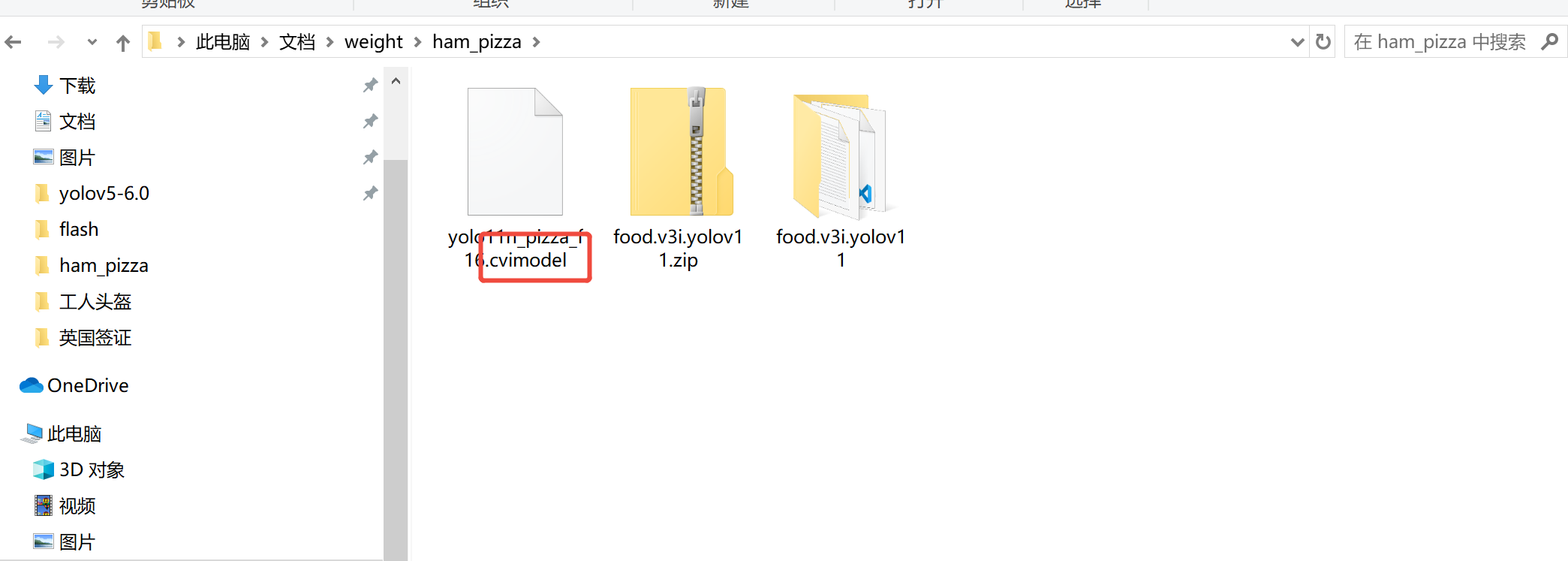
最终,将以 cvimodel 为后缀的模型文件下载到本地计算机,该文件将用于下一步操作。
如需了解更多细节,可参考完整在线资料:wiki 文档 或 中文指南
第四步:模型部署到reCamera
选项 1:reCamera 基础款
步骤 1:准备与连接
-
确保你已准备好 reCamera 设备和一根 Type-C 数据线。
-
 使用数据线将 reCamera 与电脑连接。
使用数据线将 reCamera 与电脑连接。

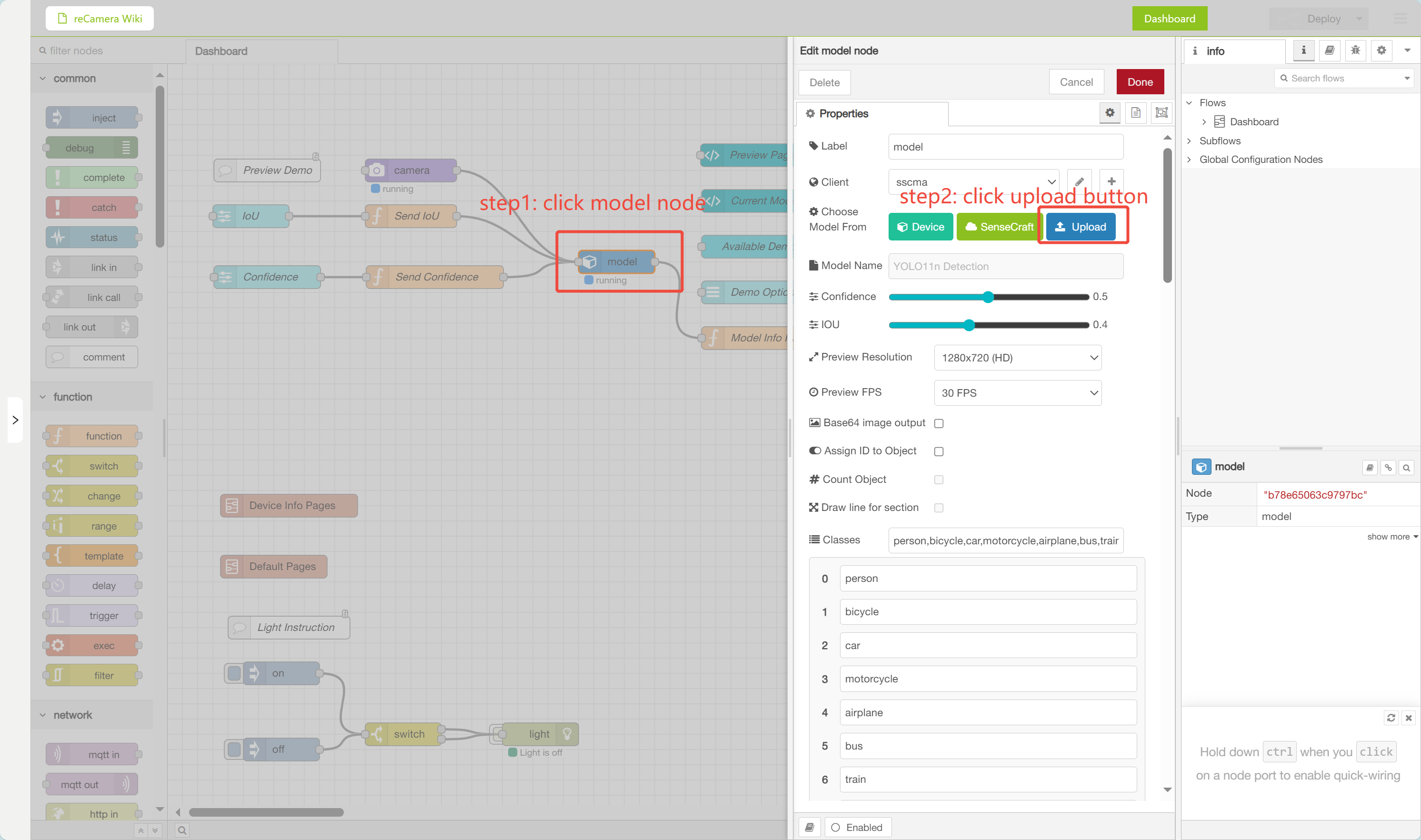
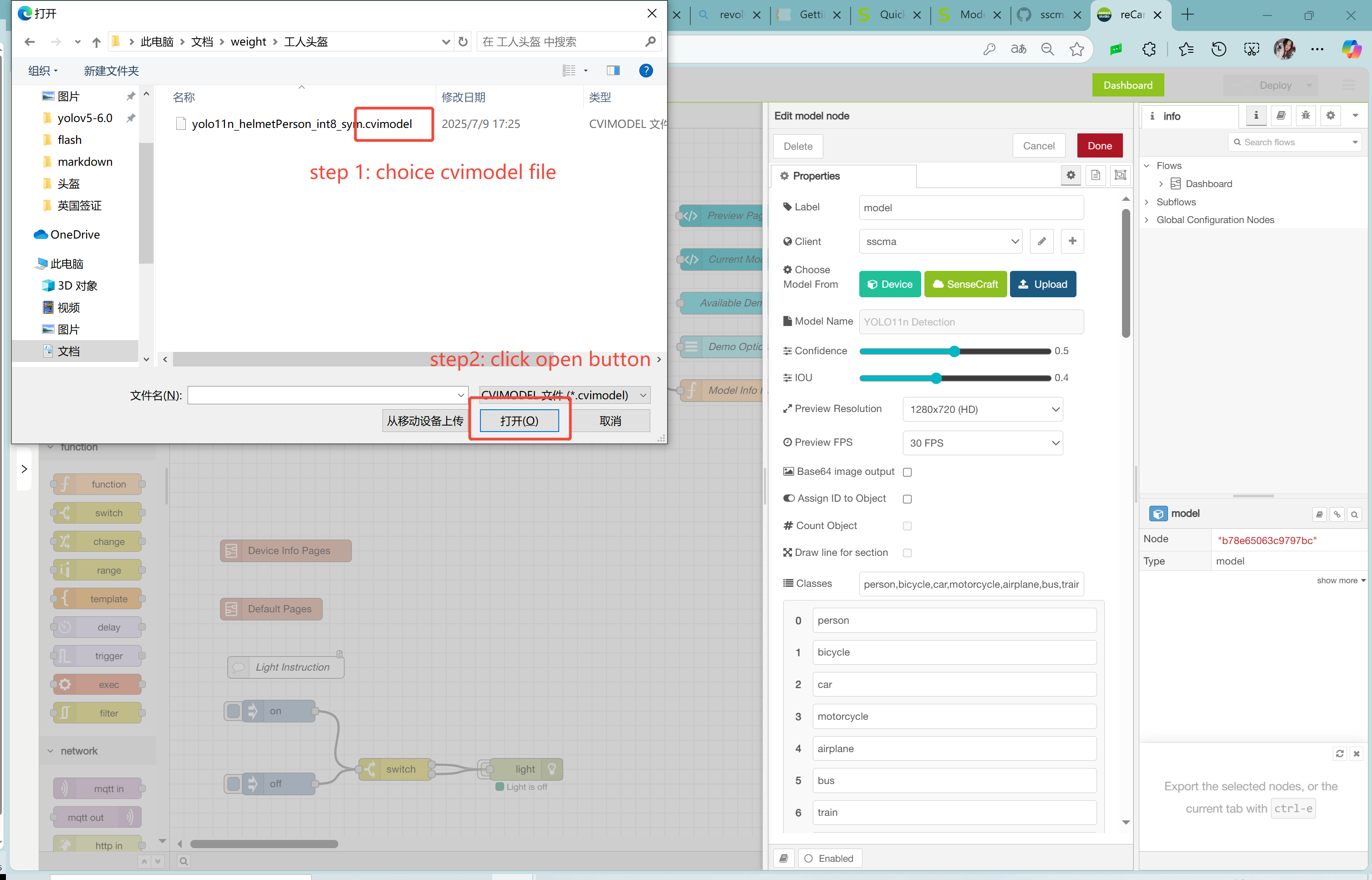
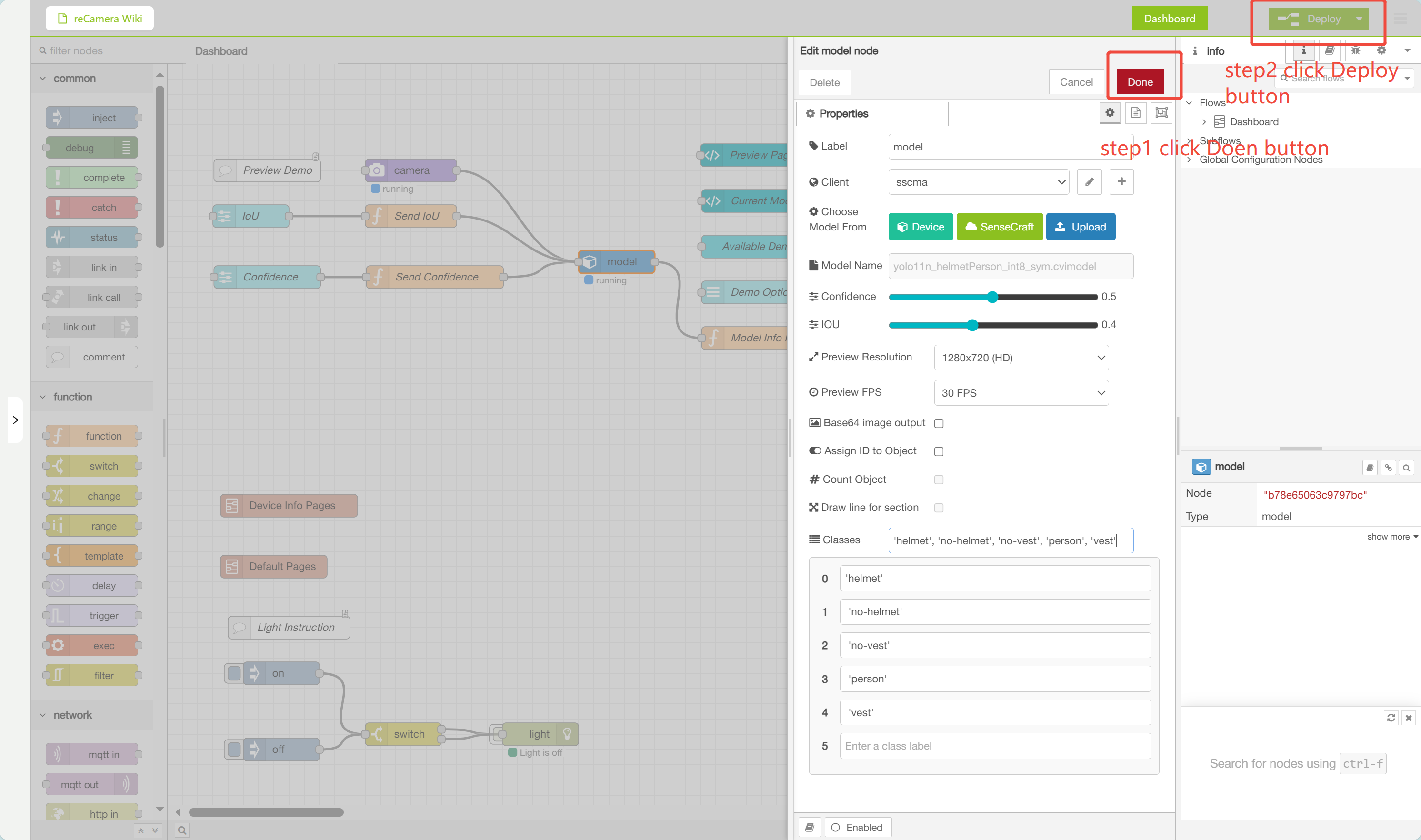
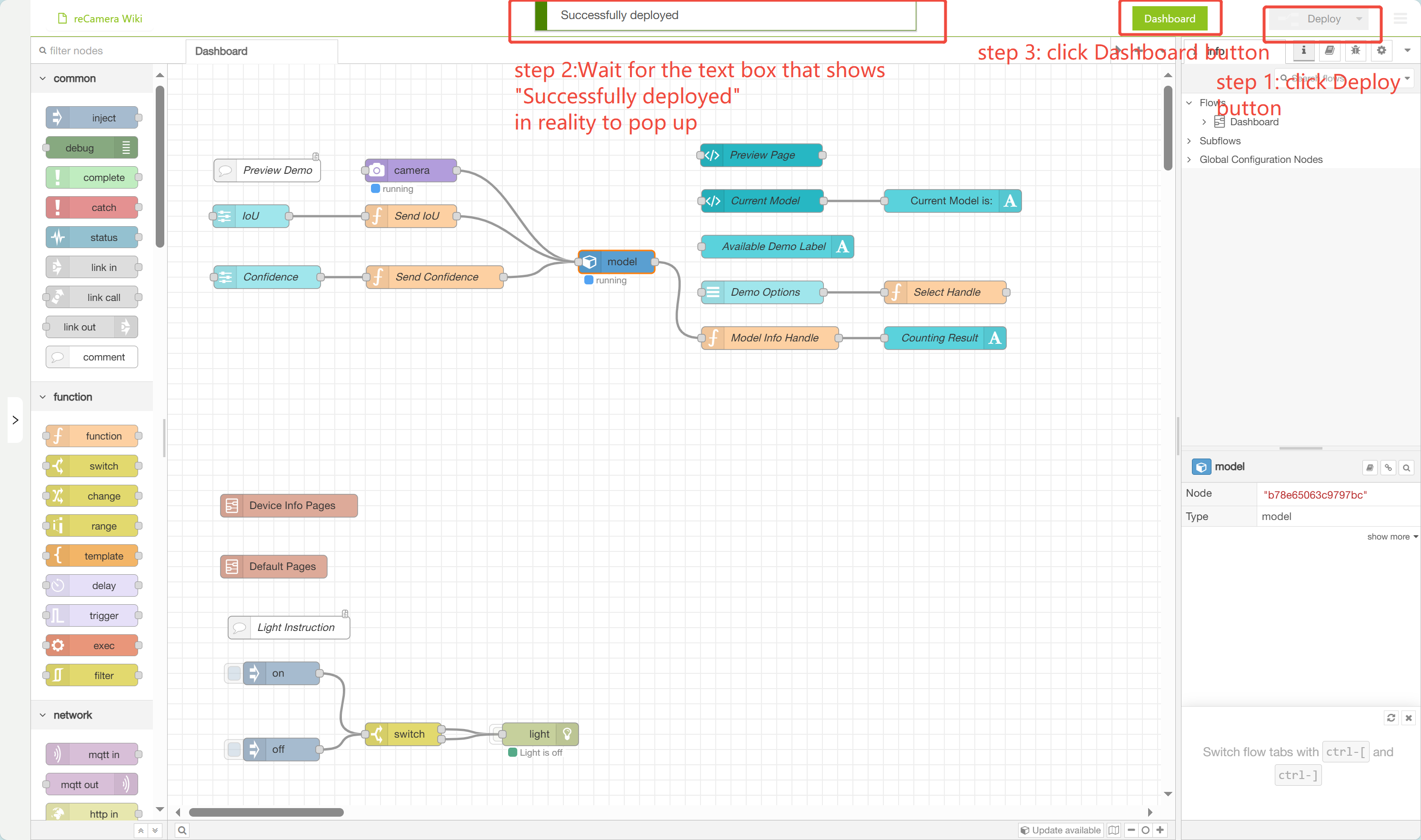
步骤 2:将模型部署到 reCamera
- 访问 192.168.42.1 进入 reCamera 的加载页面。登录的 用户名 为:root;密码 为:recamera.1


http://192.168.42.1/#/workspace //工作区链接,用于上传模型
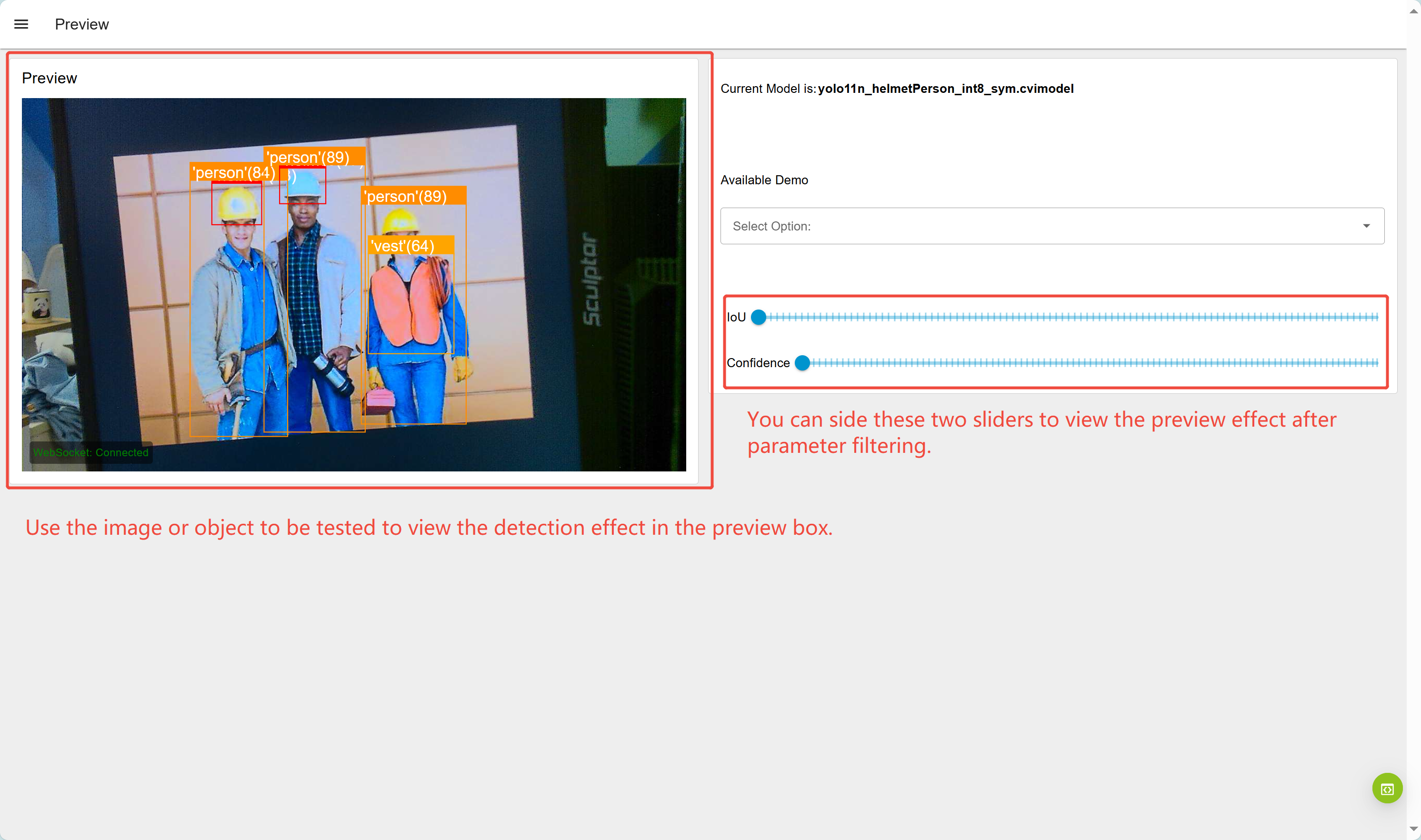
http://192.168.42.1/#/dashboard //拍摄预览视频链接
http://192.168.42.1/#/network //后端网页链接,可配置网络设置、固件更新等
更多 reCamera 使用教程,请访问:https://wiki.seeedstudio.com/recamera_develop_with_node-red/
选项 2:reCamera 显微镜套件
步骤 1:设备准备与组装
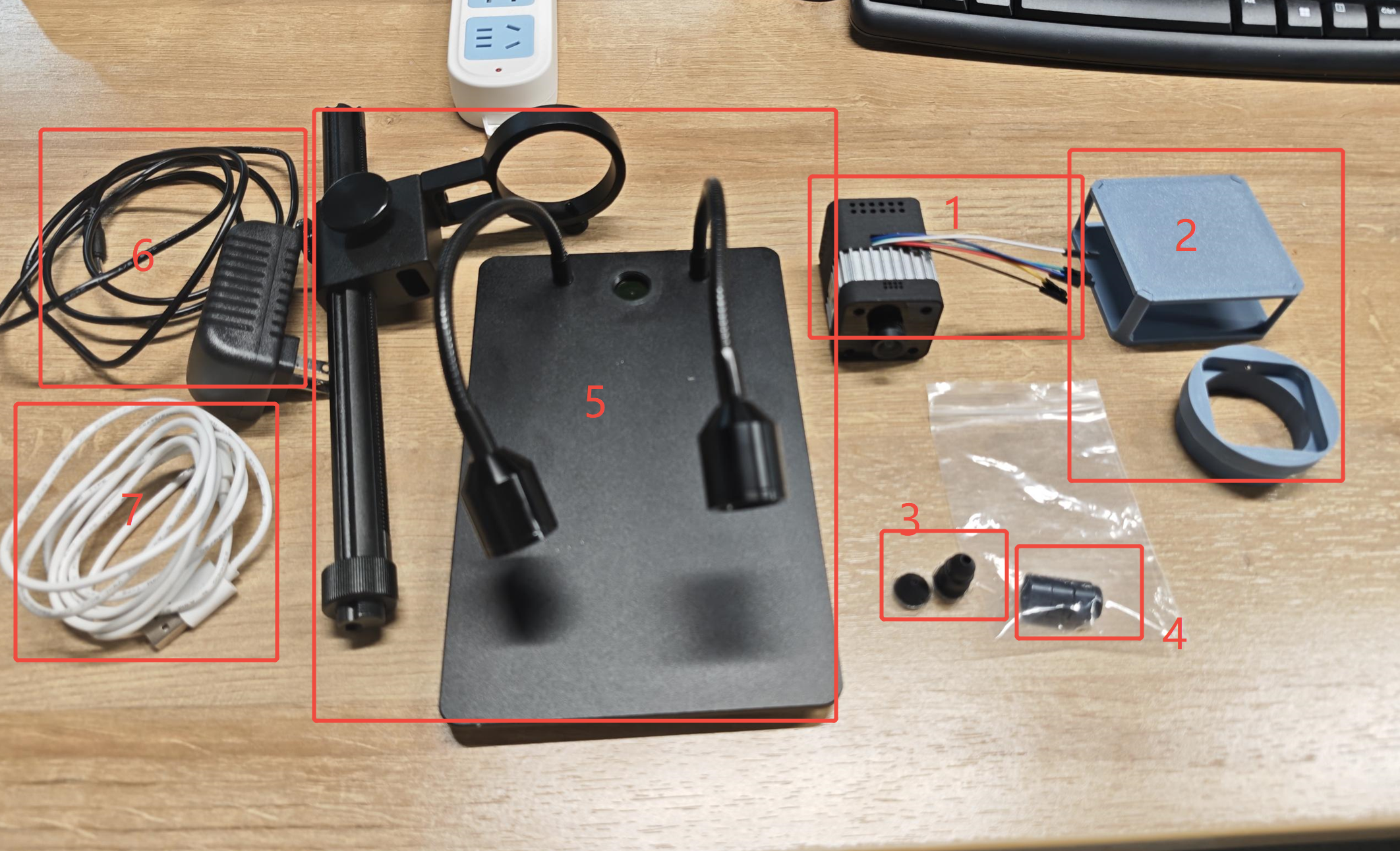
确保你的设备清单包含以下物品:
-
reCamera POE 设备
-
3D 打印机(2 台)
-
M12 镜头(2 个)
-
M12 镜头延长支架(3 个)
-
显微镜支架
-
12V 电源适配器
-
Type-C 数据线
按图所示组装支架,连接 12V 电源,并安装 3D 打印部件。
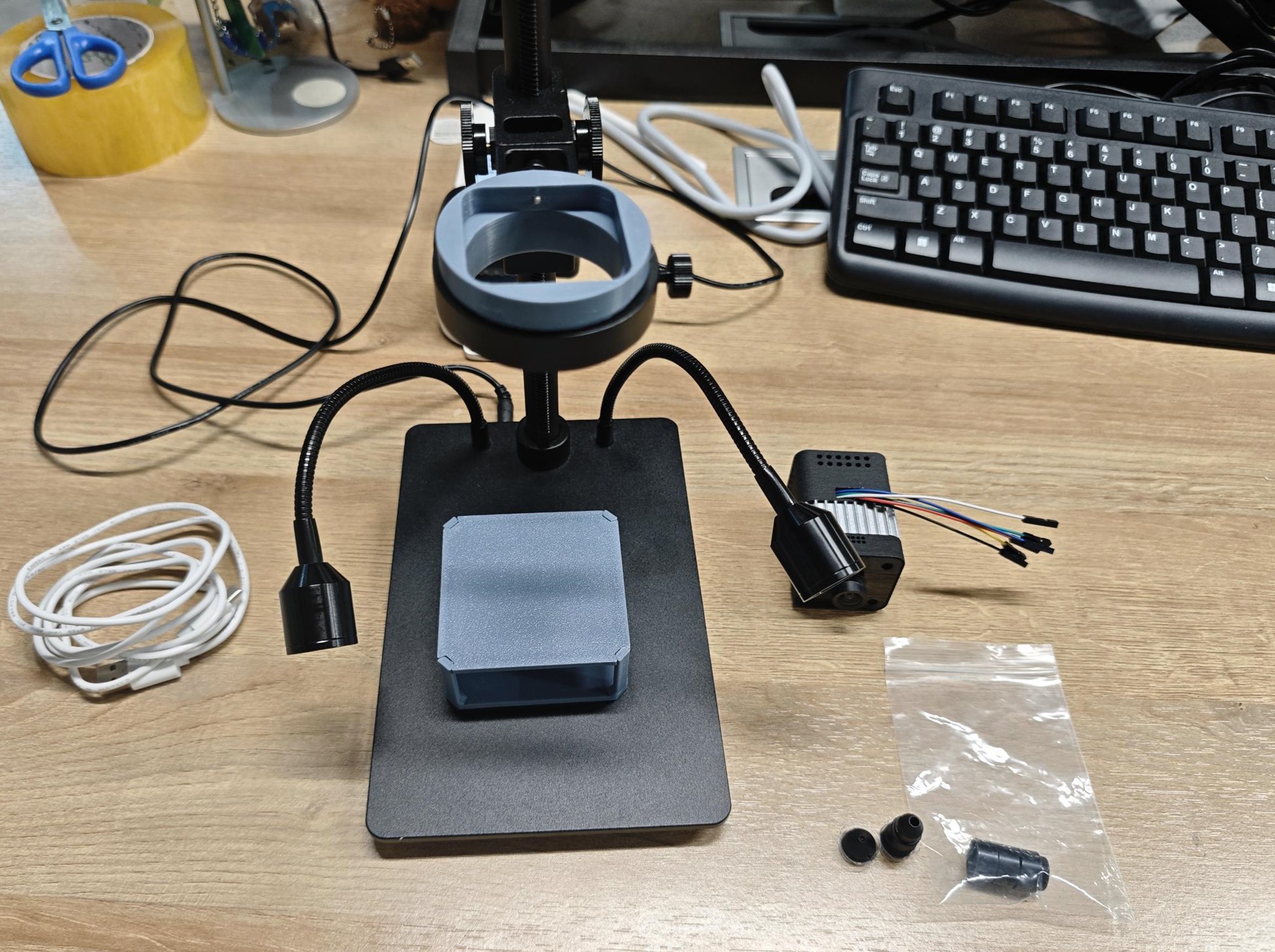
如图所示,显微镜套件包含两个镜头,需取下广角镜头,更换为另外两个专用镜头。

步骤 2:镜头使用与部署
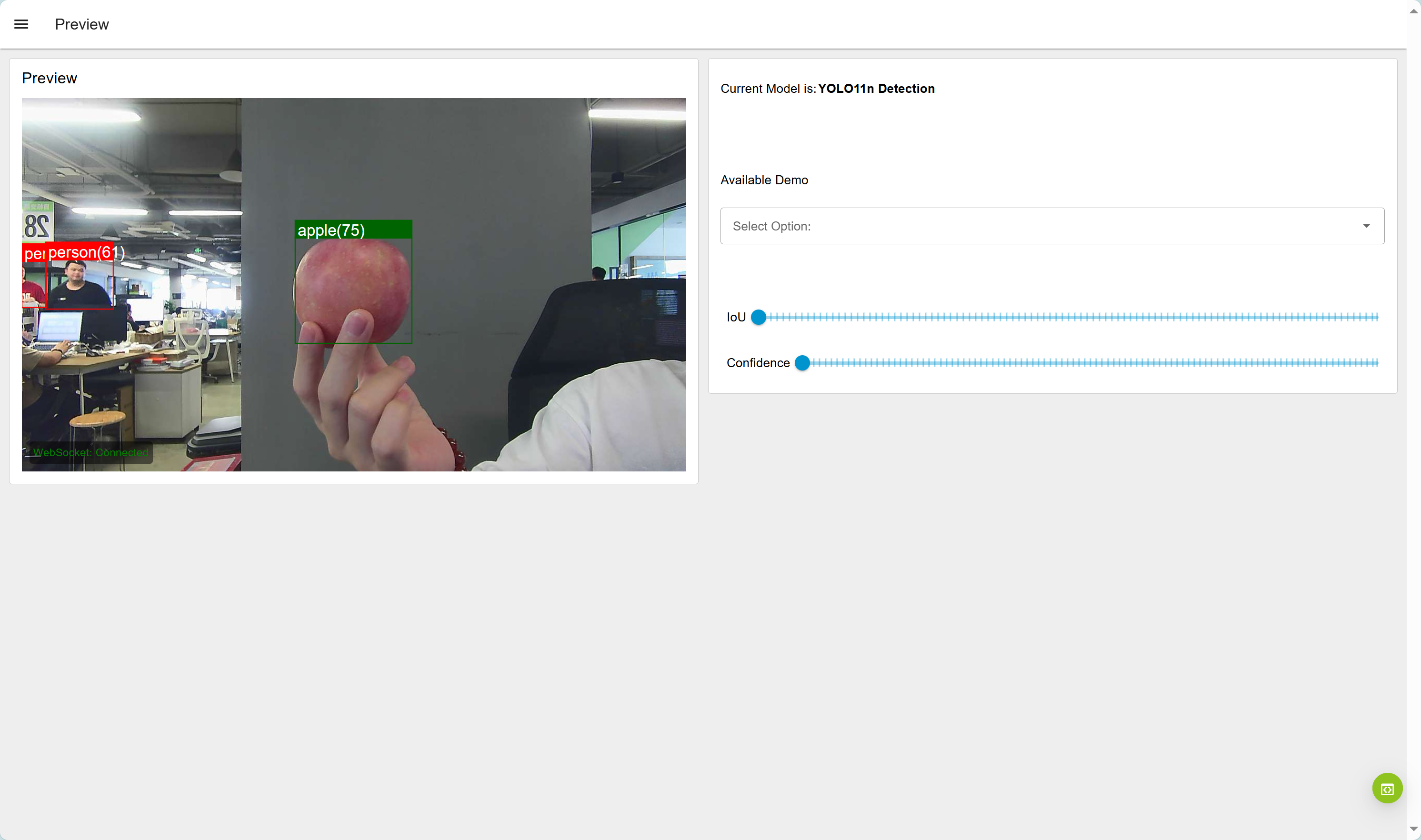
子选项 1:镜头 1(显微镜镜头)的使用
按图所示,取下原有镜头,安装三个镜头延长转接器,然后装上镜头 1。

如图所示,使用 USB 数据线连接电脑。
访问 192.168.42.1 进入 reCamera 的加载页面,登录的 用户名 为:root;密码 为:recamera.1

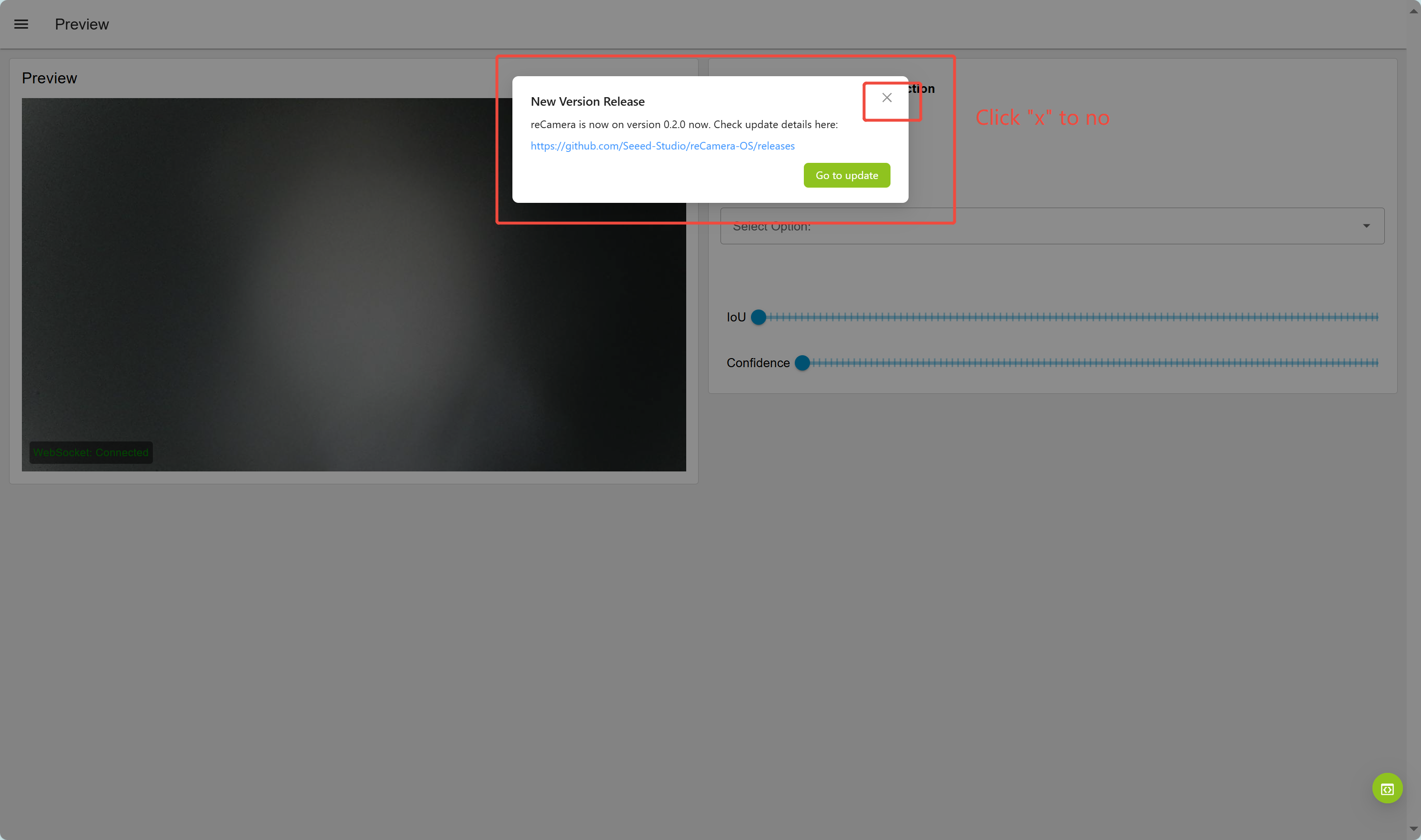
若出现如下提示,请点击 “取消”。
可向工作人员领取标本切片,将其放置在载物台上。通过调整相机与物体的位置,即可观察微观世界的图像。

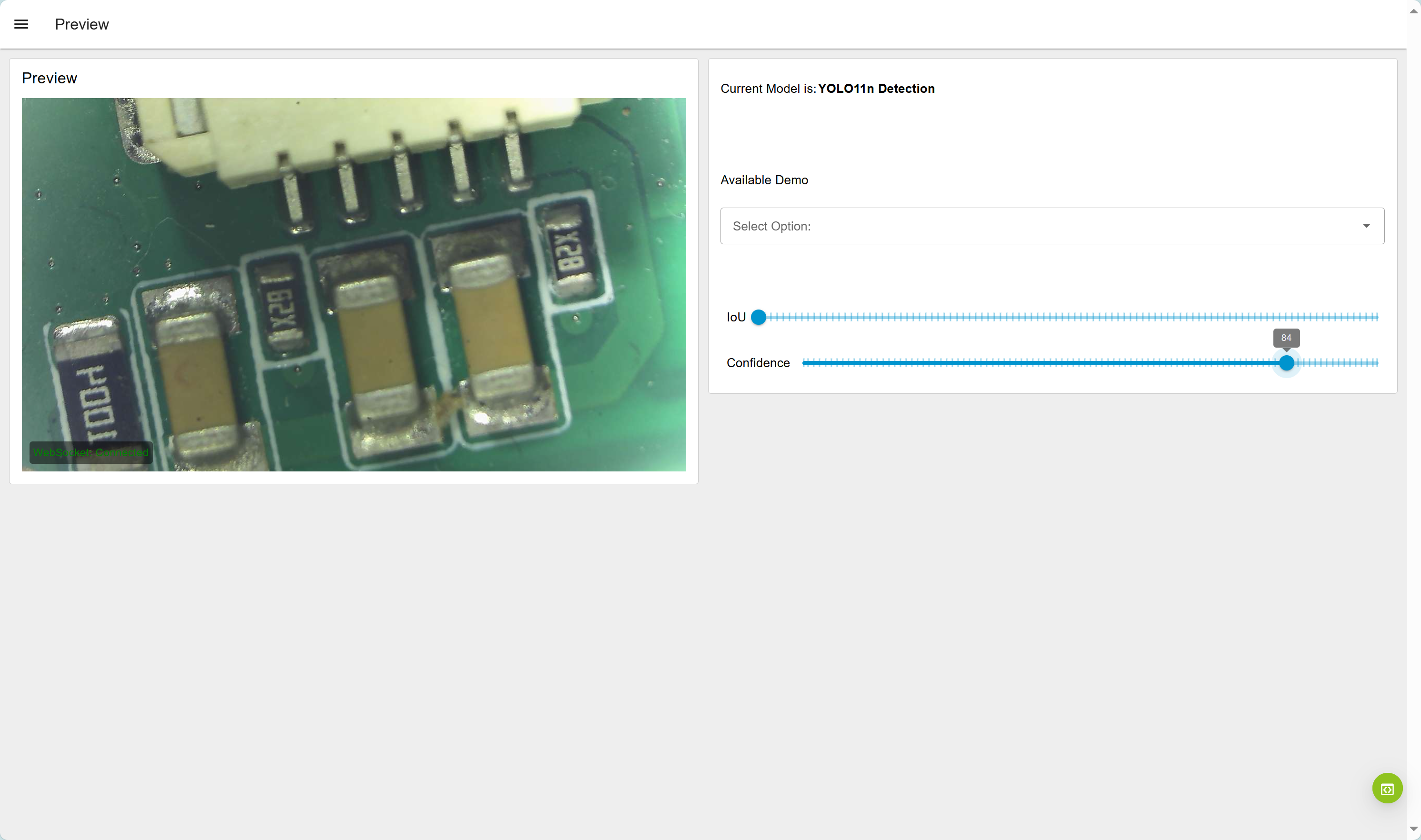
子选项 2:镜头 2(PCB 显微镜头)的使用
按图所示,取下原有镜头,安装一个镜头延长转接器,然后装上镜头 2。

如图所示,使用 USB 数据线连接电脑。
访问 192.168.42.1 进入 reCamera 的加载页面,登录的 用户名 为:root;密码 为:recamera.1

若出现如下提示,请点击 “取消”。
通过调整相机与物体的位置,即可观察 PCB(印制电路板)的细节。
模型部署操作,请参考 将模型部署到reCamera。
选项 3:reCamera 高清 POE 版本
步骤 1:准备与连接
-
确保你已准备好 reCamera 高清 POE 设备和一根 Type-C 数据线。
-
 使用数据线将 reCamera 与电脑连接。
使用数据线将 reCamera 与电脑连接。
步骤 2:查看预览
-
访问 192.168.42.1 进入 reCamera 的加载页面,登录的 用户名 为:root;密码 为:recamera.1
-
模型部署或登录操作,请参考将模型部署到reCamera。
-
reCamera 高清 POE 版的软件与默认版一致,但该版本设备配备了更清晰的 CMOS 传感器和更广角度的镜头。
步骤 3:POE 硬件新增功能说明(可选)
以下介绍 POE 设备硬件的新增功能,该内容与本次工作坊无关,仅供参考。
POE 版设备支持 POE 供电功能,可通过 POE 交换机的网线实现供电。

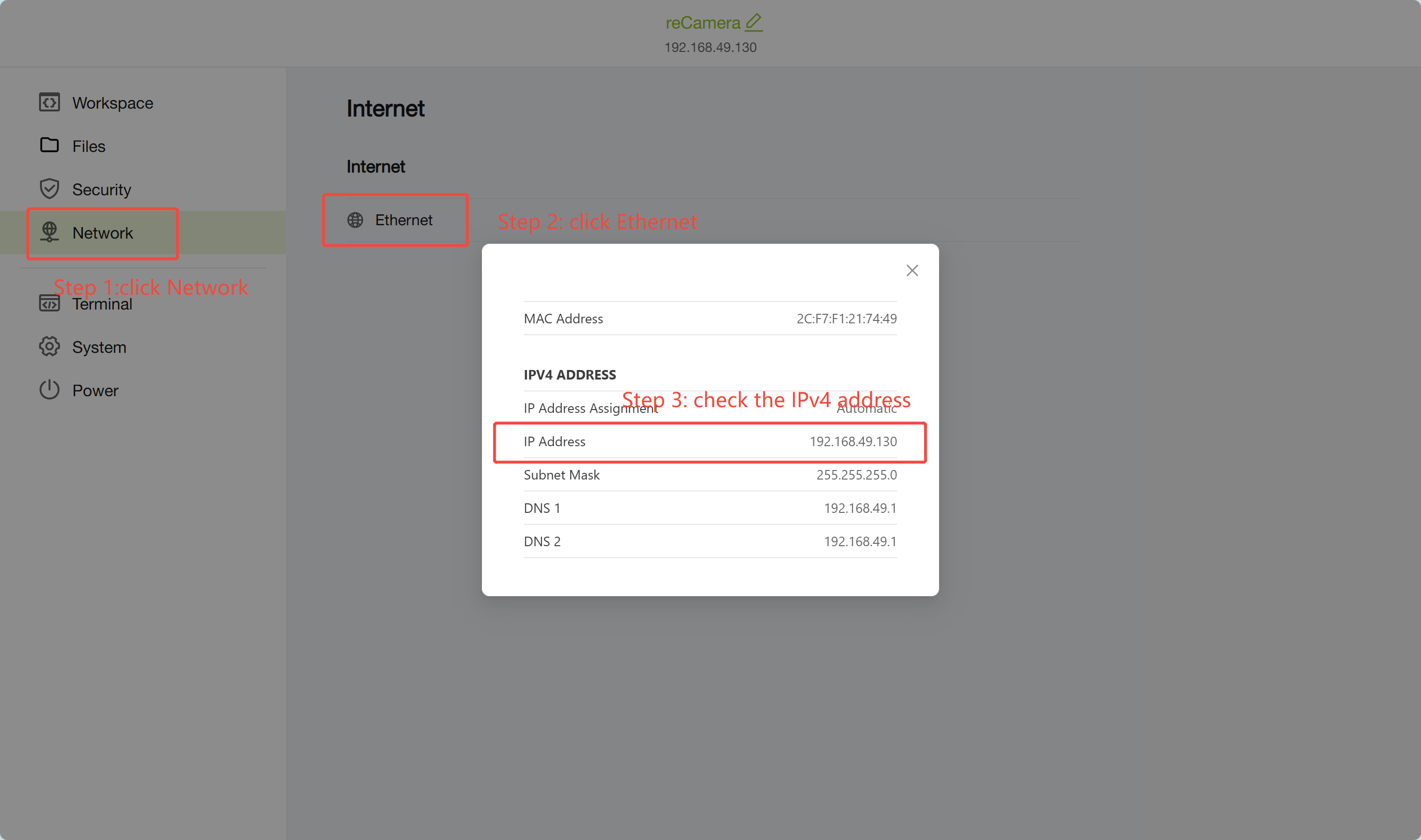
你可以通过路由器分配的 IP 地址访问设备后端。
若无法查看路由器分配的 IP 地址,也可通过 USB 数据线连接设备,访问 该地址 查看 IPv4 地址。
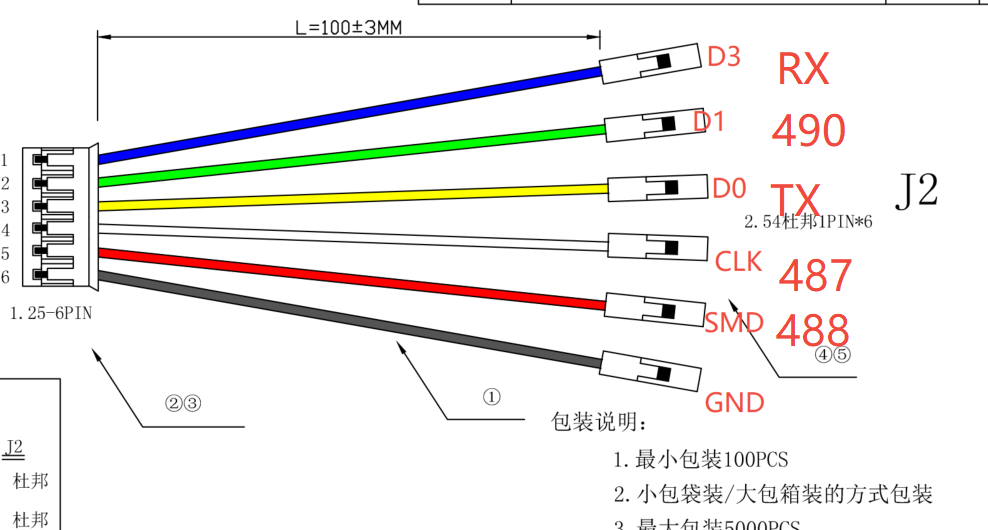
POE 版设备还配备 3 个自定义 IO 端口和 1 个串口:
- 490、487、488 均可配置为输入或输出 IO 端口,这些数字代表芯片内部的配置编号。
选项 4:reCamera 云台版本
步骤 1:准备与连接
-
确保你已准备好 reCamera 云台版设备、一个 12V 直流电源适配器和一根 Type-C 数据线。
 首先,将 12V 电源适配器连接到 reCamera 云台,等待云台电机完成校准。
首先,将 12V 电源适配器连接到 reCamera 云台,等待云台电机完成校准。
(注意:必须先将 12V 电源适配器连接到云台,否则电机无法成功初始化。)
 然后,使用 USB 数据线将 reCamera 云台与电脑连接。
然后,使用 USB 数据线将 reCamera 云台与电脑连接。

步骤 2:查看预览
-
访问 192.168.42.1 进入 reCamera 的加载页面,登录的 用户名 为:root;密码 为:recamera.1
-
模型部署或登录操作,请参考 将模型部署到reCamera。
-
reCamera 云台版的预览功能与默认版类似,但额外增加了电机控制和目标跟踪功能。

注意事项
若连接 reCamera 后电脑无法正常联网,可参考以下 wiki 文档获取解决方案: